-
1 hours of service
время работы станции
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > hours of service
-
2 on-air time
время выхода радиостанции на связь; продолжительность работы станции ( на передачу или прием) -
3 time
1. n время выполнения2. n период времениit took him a long time to do it, he took a long time doing it — ему потребовалось немало времени, чтобы сделать это; он немало с этим провозился
all the time, the whole time — всё время, всегда
all the time we were working — в течение всего времени, что мы работали
at one time — одно время, когда-то
for the time being — пока, до поры до времени
I think that we may win in time — думаю, что со временем нам удастся победить
in no time, in less than no time — очень быстро, мигом, в два счёта
in the same flash of time — в то же мгновение, в тот же миг
to tell the time — показывать время; показывать, который час
time interrupt — временное прерывание; прерывание по времени
3. n сезон, пора, времяsowing time — время сева, посевной период, посевная
4. n долгое времяhe was gone time before you got there — он ушёл задолго до того, как вы туда явились
settling time — время установления сигнала; время успокоения
reversal time — время реверсирования; время перемагничивания
5. n час, точное времяwhat time, at what time — в какое время, в котором часу; когда
6. n момент, мгновение; определённый момент, определённое времяsome time — в какой-то момент, в какое-то время
some time — когда-нибудь, рано или поздно
at times — по временам, время от времени
at the time — в тот момент, в то время
at the same time — в то же самое время, одновременно; в тот же момент
at any time you like — в любой момент, когда вам будет удобно
at the proper time, when the time comes — в своё время, когда придёт время
we shall do everything at the proper time — мы всё сделаем, когда нужно;
between times — иногда, временами
block-to-block time — время, затраченное на выполнение рейса
travel time — время, необходимое на переходы в часы работы
time modulation — временная модуляция; модуляция по времени
7. n время прибытия или отправления8. n срок, времяin time — в срок, вовремя
in due time — в своё время, своевременно
I was just in time to see it — я успел как раз вовремя, чтобы увидеть это
behind time, out of time — поздно, с опозданием
high time — давно пора, самое время
time! — время вышло!; ваше время истекло
time is drawing on — времени остаётся мало, срок приближается
9. n подходящий момент, подходящее время10. n времена, пора; эпоха, эраour time — наше время, наши дни
the times we live in — наши дни; время, в которое мы живём
at all times, all the time — всегда, во все времена
a book unusual for its time — книга, необычная для своего времени
from time immemorial — с незапамятных времён, испокон веку ; искони, исстари
old time — старое время; в древности, в стародавние времена, во время оно
in happier times — в более счастливые времена, в более счастливую пору
in times to come — в будущем, в грядущие времена
abreast of the times — вровень с веком; не отставая от жизни
to be abreast of the times, to move with the times — стоять вровень с веком, не отставать от жизни, шагать в ногу со временем
ahead of the time — опередивший свою эпоху, передовой
other times, other manners — иные времена — иные нравы
11. n возрастat his time of life — в его возрасте, в его годы
12. n период жизни, векit was before her time — это было до её рождения; она этого уже не застала
he died before his time — он безвременно умер;
debug time — время отладки; период отладки
13. n свободное время; досугto have no time, to be hard pressed for time — совершенно не иметь времени, торопиться
to make up for lost time — наверстать упущенное; компенсировать потери времени
to save time — экономить время, не терять попусту времени
I need time to rest — мне нужно время, чтобы отдохнуть
switching time — время переключения; время перемагничивания
response time — время ответа, время реакции; время отклика
14. n время; времяпрепровождениеto have a good time — хорошо провести время, повеселиться
one-pulse time — время действия импульса; импульсный период
15. n рабочее времяGreenwich time — время по Гринвичу, среднеевропейское время
16. n плата за работу17. n интервал между раундами18. n тайм; период, половина игрыTime Inc. — Тайм инк.
19. n скорость, темп; такт; размер; ритмto keep time — отбивать такт; выдерживать такт
20. n стих. мора21. n библ. год22. a связанный с временем23. a снабжённый часовым механизмом24. a связанный с покупками в кредит или с платежами в рассрочкуseeding time — время сева, посевная страда, сев
time base — временная ось; масштаб по оси времени
25. a подлежащий оплате в определённый срокtime wage — повременная, подённая оплата
26. v выбирать время; рассчитыватьturnover time — время переключения; время перемагничивания
to snooze time away — бездельничать, растранжиривать время
27. v назначать или устанавливать время; приурочиватьseasoning time — время, необходимое для полного увлажнения
28. v ставить29. v задавать темп; регулировать30. v отмечать по часам; засекать; определять время; хронометрироватьcore time — часы, когда все сотрудники должны быть на работе
mercifully, he came in time — к счастью, он пришёл вовремя
31. v рассчитывать, устанавливать продолжительностьclockwork apparatus timed to run for forty-eight hours — часовой механизм, рассчитанный на двое суток работы
32. v выделять время для определённого процесса33. v делать в такт34. v редк. совпадать, биться в унисонin double-quick time — быстро, в два счёта
35. v тех. синхронизироватьСинонимический ряд:1. duration (noun) continuance; duration; future; interval; lastingness; past; present; span; stretch; term; year2. era (noun) age; cycle; date; day; days; epoch; era; generation; period; season3. go (noun) bout; go; hitch; innings; shift; spell; stint; tour; trick; turn; watch4. hour (noun) hour; instant; minute; moment; occasion5. opportunity (noun) break; chance; leisure; liberty; look-in; opening; opportunity; shot; show; squeak6. tempo (noun) beat; cadence; measure; pace; rate; rhythm; swing; tempo7. while (noun) bit; space; spell; stretch; while8. adjust (verb) adjust; set; synchronize9. book (verb) book; schedule10. gauge (verb) clock; gauge; measure; regulate -
4 plc
- связь по ЛЭП
- программируемый логический контроллер
- несущая в канале ВЧ-связи по ЛЭП
- маскирование потери пакета
- контроллер с программируемой логикой
- акционерная компания с ограниченной ответственностью
акционерная компания с ограниченной ответственностью
AG - аббревиатура для обозначения AKTIENGESELLSCHAFT (акционерное общество). Оно пишется после названия немецких, австрийских или швейцарских компаний и является эквивалентом английской аббревиатуры plc (public limited company-акционерная компания с ограниченной ответственностью). Сравни: GmbH.
[ http://www.vocable.ru/dictionary/533/symbol/97]Тематики
EN
DE
- AG
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
маскирование потери пакета
Метод сокрытия факта потери медиапакетов путем генерирования синтезируемых пакетов (МСЭ-T G.1050).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
несущая в канале ВЧ-связи по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
связь по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > plc
5 programmable logic controller
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable logic controller
6 programmable controller
программируемый контроллер
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable controller
7 storage-programmable logic controller
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > storage-programmable logic controller
8 software failure
программная ошибка
ошибка (в используемом) ПО
—
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
Синонимы
EN
3.19 отказ программного обеспечения (software failure): Отказ системы из-за проявления дефекта в элементе программного обеспечения, заложенного в проекте.
[МЭК 61513, пункт 3.57]
Примечание 1 - Все отказы программного обеспечения происходят из-за дефектов проекта, так как программное обеспечение не изнашивается и не подвержено физическим отказам. Так как пусковые сигналы, которые активизируют неисправности программного обеспечения, возникают произвольно во время работы системы, следовательно, и отказы программного обеспечения также возникают случайно.
Примечание 2 - См. также «отказ», «дефект программного обеспечения».
Источник: ГОСТ Р МЭК 62340-2011: Атомные станции. Системы контроля и управления, важные для безопасности. Требования по предотвращению отказов по общей причине оригинал документа
3.57 отказ программного обеспечения (software failure): Отказ системы из-за проявившейся проектной ошибки в компоненте программного обеспечения
Примечание 1 - Все отказы программного обеспечения связаны с ошибками при проектировании, так как программное обеспечение в данном контексте не связано с физическими носителями, не изнашивается или не страдает от физических отказов. Так как триггеры, которые являются источниками сбоев программного обеспечения, задействуются при работе системы случайным образом, то отказы программного обеспечения имеют также случайный характер.
Примечание 2 - См. также «отказ», «сбой», «сбой программного обеспечения».
Источник: ГОСТ Р МЭК 61513-2011: Атомные станции. Системы контроля и управления, важные для безопасности. Общие требования оригинал документа
Англо-русский словарь нормативно-технической терминологии > software failure
9 advertising time
рекл. рекламное время, время под рекламу (допустимое время на один час работы станции, в течение которого разрешено передавать коммерческую рекламу)Syn:See:10 on-air time
11 time
время; срок; период; темп; повременный♦ blocked-out time время, которое не может быть продано под рекламу♦ class "A" television time класс "А" телевизионного времени в США (17.00-18.29 и 22.30-24.00)♦ class "AA" television time класс "АА" телевизионного времени в США (18.29-22.30)♦ class "В" television time класс "B" телевизионного времени в США (15.29-17.00)♦ class "С" television time класс "С" телевизионного времени в США (8.59-15.29)♦ class "D" television time класс "D" телевизионного времени в США (начало работы-8.59 и 24.00-конец работы)♦ drive time утренние и вечерние часы, во время которых максимальное количество людей слушают радио в автомобилях по дороге на работу или с работы♦ fringe time "пограничное" время; пред- или постпиковые периоды♦ prime time прайм-тайм; время в которое у теле- или радиоприемников собирается самое больше количество аудитории♦ reading time время, которое читатели издания в среднем затрачивают на его чтение♦ time rest time пауза♦ running time продолжительность демонстрации фильма, ролика♦ station option time собственное эфирное время станции-филиала, которым она может самостоятельно распоряжаться♦ viewing time время, проводимое телезрителем у экрана в течение суток♦ zone time (ZT) поясное время12 fault
- ток повреждения
- сверхток
- сброс
- сбой
- разлом
- повреждение (цепи, линии, устройства)
- повреждение (во взрывозащите)
- повреждение
- ошибка
- отказ
- ненормальный режим работы
- неисправность
- неисправное состояние
- нарушение
- короткое замыкание
- дизъюктивное нарушение
- дефект
- выход из строя
- аварийное сообщение
аварийное сообщение
-Параллельные тексты EN-RU
The system offers diagnostic and statistics functions and configurable warnings and faults, allowing better prediction of component maintenance, and provides data to continuously improve the entire system.
[Schneider Electric]Система (управления электродвигателем) предоставляет оператору различную диагностическую и статистическую информацию и позволяет сконфигурировать предупредительные и аварийные сообщения, что дает возможность лучше планировать техническое обслуживание и постоянно улучшать систему в целом.
[Перевод Интент]Various alarm notifications are available to indicate a compromised security state such as forced entry and door position.
[APC]Устройство может формировать различные аварийные сообщения о нарушении защиты, например, о несанкционированном проникновении или об изменении положения двери.
[Перевод Интент]
Тематики
EN
выход из строя
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]
выход системы из строя
вследствие отказа аппаратного или программного обеспечения либо средств связи
[Англо-русский толковый словарь терминов и сокращений по ВТ, Интернету и программированию. © 1998-2007 гг., Э.М. Пройдаков, Л.А. Теплицкий. 13,8 тыс. статей.]
выход из строя
-
[Интент]Единичные выходы из строя в процессе испытаний элементов электронной техники (микросхем, электровакуумных и полупроводниковых приборов, конденсаторов, резисторов, кварцевых резонаторов и т.д.), а также ламп накаливания и предохранителей не могут служить основанием для прекращения испытаний, если это не вызвано недостатком конструкции прибора.
При повторных выходах из строя тех же элементов испытания следует считать неудовлетворительными.
[ ГОСТ 24314-80]При выходе из строя отдельно стоящих вентиляторов на двигателях мельниц, дымососов, мельничных вентиляторов, вентиляторов первичного воздуха и т.д. необходимо при первой возможности, но не позже чем его допускается заводской инструкцией, отключить двигатель 6 кВ для ремонта вентилятора охлаждения двигателя.
[РД 34.20.565]Судовая электрическая сеть, предназначенная для передачи электроэнергии при выходе из строя линий электропередачи силовой сети или исчезновении напряжения
[ ГОСТ 22652-77]Тематики
Синонимы
EN
дизъюктивное нарушение
Относительное перемещение частей пластов вдоль плоскости их разрыва (геол.)
[ http://slovarionline.ru/anglo_russkiy_slovar_neftegazovoy_promyishlennosti/]Тематики
EN
короткое замыкание
Случайное или намеренное соединение резистором или импедансом со сравнительно низким сопротивлением двух или более точек в цепи, нормально находящихся под различным напряжением.
Случайное или намеренное низкоимпедансное или низкоомное соединение двух или более точек электрической цепи, нормально находящихся под разными электрическими потенциалами. (вариант компании Интент)
МЭК 60050(151-03-41) [2].
[ ГОСТ Р 50030. 1-2000 ( МЭК 60947-1-99)]
короткое замыкание
Случайный или преднамеренный проводящий путь между двумя или более проводящими частями, принуждающий различия электрических потенциалов между этими проводящими частями становиться равными или близкими к нулю.
Короткое замыкание обычно возникает в аварийном режиме электроустановки здания при повреждении изоляции токоведущих частей, находящихся под разными электрическими потенциалами, и возникновении между этими частями электрического контакта, имеющего пренебрежимо малое полное сопротивление. Короткое замыкание также может быть следствием ошибочных действий, совершаемых персоналом при монтаже и эксплуатации электроустановки здания, когда соединяют между собой проводящие части, которые в нормальном режиме находятся под разными электрическими потенциалами.
Короткое замыкание характеризуется током короткого замыкания, который, многократно превышая номинальный ток электрической цепи, может вызвать возгорание её элементов и явиться причиной пожара в здании. Поэтому в электроустановках зданий всегда проводят мероприятия, направленные на снижение вероятности возникновения короткого замыкания, а также выполняют защиту от короткого замыкания с помощью устройств защиты от сверхтока.
[ http://www.volt-m.ru/glossary/letter/%CA/view/27/]
короткое замыкание
Случайное или преднамеренное соединение двух или более проводящих частей, вызывающее снижение разности электрических потенциалов между этими частями до нуля или значения, близкого к нулю.
[ ГОСТ Р МЭК 60050-195-2005]
короткое замыкание
КЗ
замыкание, при котором токи в ветвях электроустановки, примыкающих к месту его возникновения, резко возрастают, превышая наибольший допустимый ток продолжительного режима
[Методические указания по защите распределительных электрических сетей напряжением 0,4-10 кВ от грозовых перенапряжений]EN
short-circuit
accidental or intentional conductive path between two or more conductive parts forcing the electric potential differences between these conductive parts to be equal to or close to zero
Source: 151-03-41 MOD
[IEV number 195-04-11]FR
court-circuit
chemin conducteur accidentel ou intentionnel entre deux ou plusieurs parties conductrices forçant les différences de potentiel électriques entre ces parties conductrices à être nulles ou proches de zéro
Source: 151-03-41 MOD
[IEV number 195-04-11]Параллельные тексты EN-RU
A short-circuit is a low impedance connection between two conductors at different voltages.
[ABB]Короткое замыкание представляет собой низкоомное соединение двух проводников, находящихся под разными потенциалами.
[Перевод Интент]Тематики
- электробезопасность
- электротехника, основные понятия
Синонимы
- КЗ
EN
DE
FR
нарушение
[Департамент лингвистических услуг Оргкомитета «Сочи 2014». Глоссарий терминов]EN
fault
Another term for offense.
[Департамент лингвистических услуг Оргкомитета «Сочи 2014». Глоссарий терминов]
Тематики
EN
неисправное состояние
Состояние объекта, при котором он не соответствует хотя бы одному из требований нормативно-технической и (или) конструкторской (проектной) документации.
[ ГОСТ 27.002-89]
[ОСТ 45.152-99]
неисправное состояние
неисправность
По ГОСТ 13377-75
[ ГОСТ 24166-80]
неисправное состояние
Состояние системы тревожной сигнализации, препятствующее реагированию системы на наличие опасности в соответствии с требованиями стандартов.
[ ГОСТ Р 50775-95]
[МЭК 839-1-1-88]Тематики
- надежность, основные понятия
- ремонт судов
- системы охраны и безопасности
- тех. обсл. и ремонт средств электросвязи
Обобщающие термины
Синонимы
EN
DE
FR
неисправность
отказ в работе
Состояние машины, характеризующееся неспособностью выполнять заданную функцию, исключая случаи проведения профилактического технического обслуживания, других запланированных действий или недостаток внешних ресурсов (например, отключение энергоснабжения).
Примечание 1
Неисправность часто является результатом повреждения самой машины, однако она может иметь место и без повреждения.
Примечание 2
На практике термины «неисправность», «отказ» и «повреждение» часто используются как синонимы.
[ ГОСТ Р ИСО 12100-1:2007]
неисправность
Состояние оборудования, характеризуемое его неспособностью выполнять требуемую функцию, исключая профилактическое обслуживание или другие планово-предупредительные действия, а также исключая неспособность выполнять требуемую функцию из-за недостатка внешних ресурсов.
Примечание - Неисправность часто является следствием отказа самого оборудования, но может существовать и без предварительного отказа.
[ГОСТ ЕН 1070-2003]
неисправность
Состояние технического объекта (элемента), характеризуемое его неспособностью выполнять требуемую функцию, исключая периоды профилактического технического обслуживания или другие планово-предупредительные действия, или в результате недостатка внешних ресурсов.
Примечания
1 Неисправность является часто следствием отказа самого технического объекта, но может существовать и без предварительного отказа.
2 Английский термин «fault» и его определение идентичны данному в МЭК 60050-191 (МЭС 191-05-01) [1]. В машиностроении чаще применяют французский термин «defaut» или немецкий термин «Fehler», чем термины «panne» и «Fehlzusstand», которые употребляют с этим определением.
[ ГОСТ Р ИСО 13849-1-2003]Тематики
EN
- abnormality
- abort
- abortion
- breakage
- breakdown
- bug
- defect
- disease
- disrepair
- disturbance
- fail
- failure
- failure occurrence
- fault
- faultiness
- fouling
- health problem
- layup
- malfunction
- problem
- shutdown
- trouble
DE
FR
ненормальный режим работы электротехнического изделия
Режим работы электротехнического изделия (электротехнического устройства, электрооборудования), при котором значение хотя бы одного из параметров режима выходит за пределы наибольшего или наименьшего рабочего значения.
[ ГОСТ 18311-80]
К ненормальным относятся режимы, связанные с отклонениями от допустимых значений величин тока, напряжения и частоты, опасные для оборудования или устойчивой работы энергосистемы.
Рассмотрим наиболее характерные ненормальные режимы.а) Перегрузка оборудования, вызванная увеличением тока сверх номинального значения. Номинальным называется максимальный ток, допускаемый для данного оборудования в течение неограниченного времени.
Если ток, проходящий по оборудованию, превышает номинальное значение, то за счет выделяемого им дополнительного тепла температура токоведущих частей и изоляции через некоторое время превосходит допустимую величину, что приводит к ускоренному износу изоляции и ее повреждению. Время, допустимое для прохождения повышенных токов, зависит от их величины. Характер этой зависимости показан на рис. 1-3 и определяется конструкцией оборудования и типом изоляционных материалов. Для предупреждения повреждения оборудования при его перегрузке необходимо принять меры к разгрузке или отключению оборудования.б) Качания в системах возникают при выходе из синхронизма работающих параллельно генераторов (или электростанций) А и В (рис. 1-2, б). При качаниях в каждой точке системы происходит периодическое изменение («качание») тока и напряжения. Ток во всех элементах сети, связывающих вышедшие из синхронизма генераторы А и В, колеблется от нуля до максимального значения, во много раз превышающего нормальную величину. Напряжение падает от нормального до некоторого минимального значения, имеющего разную величину в каждой точке сети. В точке С, называемой электрическим центром качаний, оно снижается до нуля, в остальных точках сети напряжение падает, но остается больше нуля, нарастая от центра качания С к источникам питания А и В. По характеру изменения тока и напряжения качания похожи на к. з. Возрастание тока вызывает нагревание оборудования, а уменьшение напряжения нарушает работу всех потребителей системы. Качание — очень опасный ненормальный режим, отражающийся на работе всей энергосистемы.
в) Повышение напряжения сверх допустимого значения возникает обычно на гидрогенераторах при внезапном отключении их нагрузки. Разгрузившийся гидрогенератор увеличивает частоту вращения, что вызывает возрастание э. д. с. статора до опасных для его изоляции значений. Защита в таких случаях должна снизить ток возбуждения генератора или отключить его.
Опасное для изоляции оборудования повышение напряжения может возникнуть также при одностороннем отключении или включении длинных линий электропередачи с большой емкостной проводимостью.
Кроме отмеченных ненормальных режимов, имеются и другие, ликвидация которых возможна при помощи релейной защиты.[Чернобровов Н. В. Релейная защита. Учебное пособие для техникумов]
Тематики
- изделие электротехническое
- релейная защита
- электротехника, основные понятия
Синонимы
EN
отказ
Нарушение способности оборудования выполнять требуемую функцию.
Примечания
1. После отказа оборудование находится в неисправном состоянии.
2. «Отказ» является событием, в отличие от «неисправности», которая является состоянием.
3. Это понятие, как оно определено, не применяют коборудованиюобъекту, состоящему только из программных средств.
4. На практике термины «отказ» и «неисправность» часто используют как синонимы.
[ГОСТ ЕН 1070-2003]
[ ГОСТ Р ИСО 13849-1-2003]
[ ГОСТ Р МЭК 60204-1-2007]
отказ
Событие, заключающееся в нарушении работоспособного состояния объекта.
[ ГОСТ 27.002-89]
[ОСТ 45.153-99]
[СТО Газпром РД 2.5-141-2005]
[СО 34.21.307-2005]
отказ
Событие, заключающееся в нарушении работоспособного состояния машины и (или) оборудования вследствие конструктивных нарушений при проектировании, несоблюдения установленного процесса производства или ремонта, невыполнения правил или инструкций по эксплуатации.
[Технический регламент о безопасности машин и оборудования]EN
failure
the termination of the ability of an item to perform a required function
NOTE 1 – After failure the item has a fault.
NOTE 2 – "Failure" is an event, as distinguished from "fault", which is a state.
NOTE 3 – This concept as defined does not apply to items consisting of software only.
[IEV number 191-04-01]
NOTE 4 - In practice, the terms fault and failure are often used synonymously
[IEC 60204-1-2006]FR
défaillance
cessation de l'aptitude d'une entité à accomplir une fonction requise
NOTE 1 – Après défaillance d'une entité, cette entité est en état de panne.
NOTE 2 – Une défaillance est un passage d'un état à un autre, par opposition à une panne, qui est un état.
NOTE 3 – La notion de défaillance, telle qu'elle est définie, ne s'applique pas à une entité constituée seulement de logiciel.
[IEV number 191-04-01]Тематики
- безопасность в целом
- безопасность гидротехнических сооружений
- безопасность машин и труда в целом
- газораспределение
- надежность средств электросвязи
- надежность, основные понятия
Обобщающие термины
EN
DE
FR
повреждение
Повреждение любого элемента, разделения, изоляции или соединения между элементами, не являющихся неповреждаемыми по МЭК 60079-11 [8], при проведении испытаний на искробезопасность.
[ ГОСТ Р МЭК 60050-426-2006]
Тематики
EN
повреждение (цепи, линии, устройства)
-
[Интент]Тематики
- выключатель автоматический
- релейная защита
- электротехника, основные понятия
EN
разлом
—
[ http://www.eionet.europa.eu/gemet/alphabetic?langcode=en]EN
fault
A fracture or a zone of fractures along which there has been displacement of the sides relative to one another parallel to the fracture. (Source: BJGEO)
[http://www.eionet.europa.eu/gemet/alphabetic?langcode=en]Тематики
EN
DE
FR
сбой
Самоустраняющийся отказ или однократный отказ, устраняемый незначительным вмешательством оператора.
[ ГОСТ 27.002-89]
[ОСТ 45.153-99]
[СТО Газпром РД 2.5-141-2005]
сбой
Ненормальный режим, который может вызвать уменьшение или потерю способности функционального блока выполнять требуемую функцию.
Примечание
МЭС 191-05-01 определяет «сбой» как состояние, характеризуемое неспособностью выполнить необходимую функцию, исключая неспособности, возникающие во время профилактического ухода или других плановых мероприятий, либо в результате недостатка внешних ресурсов. Иллюстрация к этим двум точкам зрения показана на рисунке [ ИСО / МЭК 2382-14-01-10].
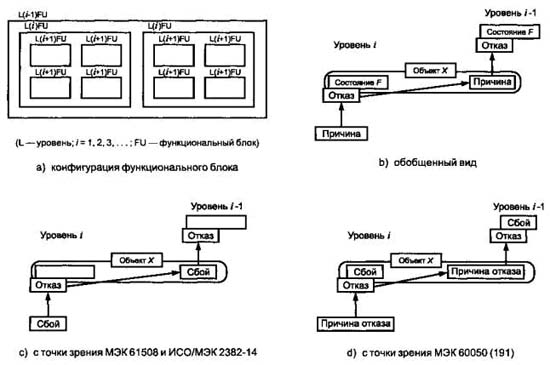
[ ГОСТ Р МЭК 61508-4-2007]Тематики
- газораспределение
- надежность средств электросвязи
- надежность, основные понятия
Обобщающие термины
EN
сброс
Разрывное нарушение, при котором сместитель падает в сторону опущенного крыла (висячее крыло опущено относительно лежачего).
[ Словарь геологических терминов и понятий. Томский Государственный Университет]Тематики
- геология, геофизика
Обобщающие термины
EN
сверхток
Любой ток, превышающий номинальный
МЭК 60050(441-11-06).
[ ГОСТ Р 50030. 1-2000 ( МЭК 60947-1-99)]
[ ГОСТ Р 50345-99( МЭК 60898-95)]
сверхток
Электрический ток, превышающий номинальный электрический ток.
Сверхток представляет собой любой электрический ток, величина которого превышает номинальный ток какого-либо элемента электроустановки здания или используемого в ней электрооборудования, например: номинальный ток электрической цепи, допустимый длительный ток проводника, номинальный ток автоматического выключателя и т. д. В нормативной и правовой документации различают два основных вида сверхтока – ток перегрузки и ток короткого замыкания.
Появление сверхтока в каком-либо элементе электроустановки здания может привести к его перегреву, возгоранию и, как следствие, к возникновению пожара в здании. Поэтому в электроустановках зданий выполняют защиту от сверхтока.
[ http://www.volt-m.ru/glossary/letter/%D1/view/59/]
сверхток
сверхток в электротехническом изделии
Ток, значение которого превосходит наибольшее рабочее значение тока электротехнического изделия (устройства).
[ ГОСТ 18311-80]
сверхток
Электрический ток, превышающий номинальный электрический ток.
Примечание - Для проводников номинальный ток считается равным длительному допустимому току.
[ ГОСТ Р МЭК 60050-826-2009]
Сверхток может оказывать или может не оказывать вредные воздействия в зависимости от его величины и продолжительности. Сверхтоки могут возникать в результате перегрузок в электроприемниках или при повреждениях, таких как короткие замыкания или замыканиях на землю
[ ГОСТ Р 50571. 1-2009 ( МЭК 60364-1: 2005)]
сверхток
Любой ток, превышающий номинальное значение. Для проводов номинальным значением является допустимый ток.
[ ГОСТ Р МЭК 60204-1-2007]EN
overcurrent
electric current exceeding the rated electric current
NOTE – For conductors, the rated current is considered as equal to the current-carrying capacity
[IEV number 826-11-14]
over-current
<>current exceeding the rated current
<>[IEC 61095, ed. 2.0 (2009-02)]
over-current
electric current the value of which exceeds a specified limiting value
[IEV number 151-15-28]
[IEV number 442-01-20]FR
surintensité, f
courant électrique supérieur au courant électrique assigné
NOTE – Pour des conducteurs, on considère que le courant assigné est égal au courant admissible.
[IEV number 826-11-14]
surintensité
courant supérieur au courant assigné
[IEC 61095, ed. 2.0 (2009-02)]
[IEV number 442-01-20]
surintensité, f
courant électrique dont la valeur dépasse une valeur limite spécifiée
[IEV number 151-15-28]Параллельные тексты EN-RU The design of LV installations leads to basic protection devices being fitted for three types of faults:
-
overloads
-
short-circuits
-
insulation faults
Низковольтные электроустановки должны быть оснащены устройствами защиты трех типов:
-
от перегрузки;
-
от короткого замыкания;
- от токов утечки.
[Перевод Интент]
Примечание.
Слово fault в данном случае пришлось опустить, поскольку:
- его нельзя перевести как "неисправность", т. к. возникновение перегрузки ( overload) не является неисправностью;
- его нельзя перевести как "сверхток", т. к. ток утечки не является сверхтоком.The chosen switchgear must withstand and eliminate faults at optimised cost with respect to the necessary performance.
[Schneider Electric]Выбранная аппаратура распределения должна иметь такие характеристики, чтобы рентабельно выдерживать и ограничивать сверхтоки.
[Перевод Интент]Тематики
Синонимы
EN
DE
FR
ток повреждения
Ток, возникающий в результате пробоя или перекрытия изоляции.
[ ГОСТ Р 51321. 1-2000 ( МЭК 60439-1-92)]
ток повреждения
Ток, который протекает через данную точку повреждения в результате повреждения изоляции.
[ ГОСТ Р МЭК 60050-826-2009]EN
fault current
current resulting from an insulation failure, the bridging of insulation or incorrect connection in an electrical circuit
[IEC 61439-1, ed. 2.0 (2011-08)]
fault current
current which flows across a given point of fault resulting from an insulation fault
[IEV number 826-11-11]FR
courant de défaut
courant résultant d'un défaut de l'isolation, du contournement de l’isolation ou d’un raccordement incorrect dans un circuit électrique
[IEC 61439-1, ed. 2.0 (2011-08)]
courant de défaut, m
courant s'écoulant en un point de défaut donné, consécutivement à un défaut de l'isolation
[IEV number 826-11-11]Тематики
EN
DE
- Fehlerstrom, m
FR
- courant de défaut, m
3.7.2 повреждение (fault): Повреждение любого элемента, разделения, изоляции или соединения между элементами, не являющимися по настоящему стандарту не повреждаемыми, от которых зависит искробезопасность цепи.
Источник: ГОСТ Р 52350.11-2005: Электрооборудование для взрывоопасных газовых сред. Часть 11. Искробезопасная электрическая цепь "I" оригинал документа
3.16 неисправность (fault): Состояние объекта, характеризующееся неспособностью исполнять требуемую функцию, исключая время профилактического технического обслуживания или других запланированных действий, или простои из-за недостатка внешних ресурсов
Примечание - Неисправность часто является результатом отказа объекта, но может существовать и без отказа.
Источник: ГОСТ Р 51901.6-2005: Менеджмент риска. Программа повышения надежности оригинал документа
3.6 неисправность (fault): Состояние элемента, характеризующееся неспособностью исполнять требуемую функцию, исключая период технического обслуживания, ремонта или других запланированных действий, а также из-за недостатка внешних ресурсов.
Примечание - Неисправность часто является результатом отказа элемента, но может существовать и без предшествующего отказа.
Источник: ГОСТ Р 51901.5-2005: Менеджмент риска. Руководство по применению методов анализа надежности оригинал документа
3.5 неисправность (fault): Состояние объекта, когда один из его элементов или группа элементов проявляют признаки деградации или нарушения работы, что может привести к отказу машины.
Примечания
1 Неисправность часто является следствием отказа, но может иметь место и при его отсутствии.
2 Состояние объекта не рассматривают как неисправное, если оно возникло вследствие запланированных процедур или нехватки внешних ресурсов.
Источник: ГОСТ Р ИСО 13379-2009: Контроль состояния и диагностика машин. Руководство по интерпретации данных и методам диагностирования оригинал документа
3.3 неисправность (fault): Состояние объекта, при котором он не способен выполнять требуемую функцию, за исключением такой неспособности при техническом обслуживании или других плановых мероприятиях или вследствие нехватки внешних ресурсов.
Примечания
1 Неисправность часто является следствием отказа объекта, но может иметь место и без него.
2 В настоящем стандарте термин «неисправность» используется наряду с термином «отказ» по историческим причинам.
Источник: ГОСТ Р 51901.12-2007: Менеджмент риска. Метод анализа видов и последствий отказов оригинал документа
3.1.30 ошибка (fault): Разность между погрешностью весоизмерительного датчика и основной погрешностью весоизмерительного датчика (см. 3.1.34).
Источник: ГОСТ Р 8.726-2010: Государственная система обеспечения единства измерений. Датчики весоизмерительные. Общие технические требования. Методы испытаний оригинал документа
3.6 дефект (fault): Неисправность или ошибка в компоненте технического обеспечения, программного обеспечения или системы
[МЭК 61513, пункт 3.22]
Примечание 1 - Дефекты могут подразделяться на случайные, например, в результате ухудшения аппаратных средств из-за старения, и систематические, например, ошибки в программном обеспечении, которые вытекают из погрешностей проектирования.
Примечание 2 - Дефект (в особенности дефект проекта) может остаться необнаруженным в системе до тех пор, пока не окажется, что полученный результат не соответствует намеченной функции, то есть возникает отказ.
Примечание 3 - См. также «ошибка программного обеспечения» и «случайный дефект».
Источник: ГОСТ Р МЭК 62340-2011: Атомные станции. Системы контроля и управления, важные для безопасности. Требования по предотвращению отказов по общей причине оригинал документа
3.2 неисправность (fault): Состояние объекта, когда один из его элементов или группа элементов проявляет признаки деградации или нарушения работы, что может привести к отказу машины.
Примечание - Неисправность может привести к отказу.
Источник: ГОСТ Р ИСО 17359-2009: Контроль состояния и диагностика машин. Общее руководство по организации контроля состояния и диагностирования оригинал документа
3.17 дефект (fault): Неисправность или ошибка в компоненте технического обеспечения, программного обеспечения или системы.
[МЭК 61513, пункт 3.22]
Источник: ГОСТ Р МЭК 60880-2010: Атомные электростанции. Системы контроля и управления, важные для безопасности. Программное обеспечение компьютерных систем, выполняющих функции категории А оригинал документа
3.6.1 сбой (fault): Ненормальный режим, который может вызвать уменьшение или потерю способности функционального блока выполнять требуемую функцию.
Примечание - МЭС 191-05-01 определяет «сбой» как состояние, характеризуемое неспособностью выполнить необходимую функцию, исключая неспособности, возникающие во время профилактического ухода или других плановых мероприятий, либо в результате недостатка внешних ресурсов. Иллюстрация к этим двум точкам зрения показана на рисунке 4 [ИСО/МЭК 2382-14-01-10].
Источник: ГОСТ Р МЭК 61508-4-2007: Функциональная безопасность систем электрических, электронных, программируемых электронных, связанных с безопасностью. Часть 4. Термины и определения оригинал документа
3.22 дефект (fault): Дефект в аппаратуре, программном обеспечении или в компоненте системы (см. рисунок 3).
Примечание 1 -Дефекты могут быть результатом случайных отказов, которые возникают, например, из-за деградации аппаратуры в результате старения; возможны систематические дефекты, например, в результате дефектов в программном обеспечении, возникающих из-за ошибок при проектировании.
Примечание 2 - Дефект (особенно дефекты, связанные с проектированием) может оставаться незамеченным, пока сохраняются условия, при которых он не отражается на выполнении функции, т.е. пока не произойдет отказ.
Примечание 3 - См. также «дефект программного обеспечения».
Источник: ГОСТ Р МЭК 61513-2011: Атомные станции. Системы контроля и управления, важные для безопасности. Общие требования оригинал документа
4.10.1 ошибка (fault): Разность между погрешностью показаний и погрешностью прибора.
Источник: ГОСТ Р ЕН 1434-1-2011: Теплосчетчики. Часть 1. Общие требования
Англо-русский словарь нормативно-технической терминологии > fault
13 switching technology
технология коммутации
-
[Интент]Современные технологии коммутации
[ http://www.xnets.ru/plugins/content/content.php?content.84]Статья подготовлена на основании материалов опубликованных в журналах "LAN", "Сети и системы связи", в книге В.Олифер и Н.Олифер "Новые технологии и оборудование IP-сетей", на сайтах www.citforum.ru и опубликована в журнале "Компьютерные решения" NN4-6 за 2000 год.
- Введение
- Коммутация первого уровня.
- Коммутация второго уровня.
- Коммутация третьего уровня.
- Коммутация четвертого уровня.
- Критерии выбора оборудования, физическая и логическая структура сети
- Качество обслуживания (QoS) и принципы задания приоритетов
- Заключение
Введение
На сегодня практически все организации, имеющие локальные сети, остановили свой выбор на сетях типа Ethernet. Данный выбор оправдан тем, что начало внедрения такой сети сопряжено с низкой стоимостью и простотой реализации, а развитие - с хорошей масштабируемостью и экономичностью.
Бросив взгляд назад - увидим, что развитие активного оборудования сетей шло в соответствии с требованиями к полосе пропускания и надежности. Требования, предъявляемые к большей надежности, привели к отказу от применения в качестве среды передачи коаксиального кабеля и перевода сетей на витую пару. В результате такого перехода отказ работы соединения между одной из рабочих станций и концентратором перестал сказываться на работе других рабочих станций сети. Но увеличения производительности данный переход не принес, так как концентраторы используют разделяемую (на всех пользователей в сегменте) полосу пропускания. По сути, изменилась только физическая топология сети - с общей шины на звезду, а логическая топология по-прежнему осталась - общей шиной.
Дальнейшее развитие сетей шло по нескольким путям:- увеличение скорости,
- внедрение сегментирования на основе коммутации,
- объединение сетей при помощи маршрутизации.
Увеличение скорости при прежней логической топологии - общая шина, привело к незначительному росту производительности в случае большого числа портов.
Большую эффективность в работе сети принесло сегментирование сетей с использованием технология коммутации пакетов. Коммутация наиболее действенна в следующих вариантах:
Вариант 1, именуемый связью "многие со многими" – это одноранговые сети, когда одновременно существуют потоки данных между парами рабочих станций. При этом предпочтительнее иметь коммутатор, у которого все порты имеют одинаковую скорость, (см. Рисунок 1).
Вариант 2, именуемый связью "один со многими" – это сети клиент-сервер, когда все рабочие станции работают с файлами или базой данных сервера. В данном случае предпочтительнее иметь коммутатор, у которого порты для подключения рабочих станций имеют одинаковую небольшую скорость, а порт, к которому подключается сервер, имеет большую скорость,(см. Рисунок 2).

Когда компании начали связывать разрозненные системы друг с другом, маршрутизация обеспечивала максимально возможную целостность и надежность передачи трафика из одной сети в другую. Но с ростом размера и сложности сети, а также в связи со все более широким применением коммутаторов в локальных сетях, базовые маршрутизаторы (зачастую они получали все данные, посылаемые коммутаторами) стали с трудом справляться со своими задачами.
Проблемы с трафиком, связанные с маршрутизацией, проявляются наиболее остро в средних и крупных компаниях, а также в деятельности операторов Internet, так как они вынуждены иметь дело с большими объемами IP-трафика, причем этот трафик должен передаваться своевременно и эффективно.
С подключением настольных систем непосредственно к коммутаторам на 10/100 Мбит/с между ними и магистралью оказывается все меньше промежуточных устройств. Чем выше скорость подключения настольных систем, тем более скоростной должна быть магистраль. Кроме того, на каждом уровне устройства должны справляться с приходящим трафиком, иначе возникновения заторов не избежать.
Рассмотрению технологий коммутации и посвящена данная статья.Коммутация первого уровня
Термин "коммутация первого уровня" в современной технической литературе практически не описывается. Для начала дадим определение, с какими характеристиками имеет дело физический или первый уровень модели OSI:
физический уровень определяет электротехнические, механические, процедурные и функциональные характеристики активации, поддержания и дезактивации физического канала между конечными системами. Спецификации физического уровня определяют такие характеристики, как уровни напряжений, синхронизацию изменения напряжений, скорость передачи физической информации, максимальные расстояния передачи информации, физические соединители и другие аналогичные характеристики.
Смысл коммутации на первом уровне модели OSI означает физическое (по названию уровня) соединение. Из примеров коммутации первого уровня можно привести релейные коммутаторы некоторых старых телефонных и селекторных систем. В более новых телефонных системах коммутация первого уровня применяется совместно с различными способами сигнализации вызовов и усиления сигналов. В сетях передачи данных данная технология применяется в полностью оптических коммутаторах.Коммутация второго уровня
Рассматривая свойства второго уровня модели OSI и его классическое определение, увидим, что данному уровню принадлежит основная доля коммутирующих свойств.
Определение. Канальный уровень (формально называемый информационно-канальным уровнем) обеспечивает надежный транзит данных через физический канал. Канальный уровень решает вопросы физической адресации (в противоположность сетевой или логической адресации), топологии сети, линейной дисциплины (каким образом конечной системе использовать сетевой канал), уведомления о неисправностях, упорядоченной доставки блоков данных и управления потоком информации.
На самом деле, определяемая канальным уровнем модели OSI функциональность служит платформой для некоторых из сегодняшних наиболее эффективных технологий. Большое значение функциональности второго уровня подчеркивает тот факт, что производители оборудования продолжают вкладывать значительные средства в разработку устройств с такими функциями.
С технологической точки зрения, коммутатор локальных сетей представляет собой устройство, основное назначение которого - максимальное ускорение передачи данных за счет параллельно существующих потоков между узлами сети. В этом - его главное отличие от других традиционных устройств локальных сетей – концентраторов (Hub), предоставляющих всем потокам данных сети всего один канал передачи данных.
Коммутатор позволяет передавать параллельно несколько потоков данных c максимально возможной для каждого потока скоростью. Эта скорость ограничена физической спецификацией протокола, которую также часто называют "скоростью провода". Это возможно благодаря наличию в коммутаторе большого числа центров обработки и продвижения кадров и шин передачи данных.
Коммутаторы локальных сетей в своем основном варианте, ставшем классическим уже с начала 90-х годов, работают на втором уровне модели OSI, применяя свою высокопроизводительную параллельную архитектуру для продвижения кадров канальных протоколов. Другими словами, ими выполняются алгоритмы работы моста, описанные в стандартах IEEE 802.1D и 802.1H. Также они имеют и много других дополнительных функций, часть которых вошла в новую редакцию стандарта 802.1D-1998, а часть остается пока не стандартизованной.
Коммутаторы ЛВС отличаются большим разнообразием возможностей и, следовательно, цен - стоимость 1 порта колеблется в диапазоне от 50 до 1000 долларов. Одной из причин столь больших различий является то, что они предназначены для решения различных классов задач. Коммутаторы высокого класса должны обеспечивать высокую производительность и плотность портов, а также поддерживать широкий спектр функций управления. Простые и дешевые коммутаторы имеют обычно небольшое число портов и не способны поддерживать функции управления. Одним из основных различий является используемая в коммутаторе архитектура. Поскольку большинство современных коммутаторов работают на основе патентованных контроллеров ASIC, устройство этих микросхем и их интеграция с остальными модулями коммутатора (включая буферы ввода-вывода) играет важнейшую роль. Контроллеры ASIC для коммутаторов ЛВС делятся на 2 класса - большие ASIC, способные обслуживать множество коммутируемых портов (один контроллер на устройство) и небольшие ASIC, обслуживающие по несколько портов и объединяемые в матрицы коммутации.
Существует 3 варианта архитектуры коммутаторов:
- переключение (cross-bar) с буферизацией на входе,
- самомаршрутизация (self-route) с разделяемой памятью
- высокоскоростная шина.
На рисунке 3 показана блок-схема коммутатора с архитектурой, используемой для поочередного соединения пар портов. В любой момент такой коммутатор может обеспечить организацию только одного соединения (пара портов). При невысоком уровне трафика не требуется хранение данных в памяти перед отправкой в порт назначения - такой вариант называется коммутацией на лету cut-through. Однако, коммутаторы cross-bar требуют буферизации на входе от каждого порта, поскольку в случае использования единственно возможного соединения коммутатор блокируется (рисунок 4). Несмотря на малую стоимость и высокую скорость продвижения на рынок, коммутаторы класса cross-bar слишком примитивны для эффективной трансляции между низкоскоростными интерфейсами Ethernet или token ring и высокоскоростными портами ATM и FDDI.


Коммутаторы с разделяемой памятью имеют общий входной буфер для всех портов, используемый как внутренняя магистраль устройства (backplane). Буферизагия данных перед их рассылкой (store-and-forward - сохранить и переслать) приводит к возникновению задержки. Однако, коммутаторы с разделяемой памятью, как показано на рисунке 5 не требуют организации специальной внутренней магистрали для передачи данных между портами, что обеспечивает им более низкую цену по сравнению с коммутаторами на базе высокоскоростной внутренней шины.

На рисунке 6 показана блок-схема коммутатора с высокоскоростной шиной, связывающей контроллеры ASIC. После того, как данные преобразуются в приемлемый для передачи по шине формат, они помещаются на шину и далее передаются в порт назначения. Поскольку шина может обеспечивать одновременную (паралельную) передачу потока данных от всех портов, такие коммутаторы часто называют "неблокируемыми" (non-blocking) - они не создают пробок на пути передачи данных.

Применение аналогичной параллельной архитектуры для продвижения пакетов сетевых протоколов привело к появлению коммутаторов третьего уровня модели OSI.
Коммутация третьего уровня
В продолжении темы о технологиях коммутации рассмотренных в предыдущем номера повторим, что применение параллельной архитектуры для продвижения пакетов сетевых протоколов привело к появлению коммутаторов третьего уровня. Это позволило существенно, в 10-100 раз повысить скорость маршрутизации по сравнению с традиционными маршрутизаторами, в которых один центральный универсальный процессор выполняет программное обеспечение маршрутизации.
По определению Сетевой уровень (третий) - это комплексный уровень, который обеспечивает возможность соединения и выбор маршрута между двумя конечными системами, подключенными к разным "подсетям", которые могут находиться в разных географических пунктах. В данном случае "подсеть" это, по сути, независимый сетевой кабель (иногда называемый сегментом).
Коммутация на третьем уровне - это аппаратная маршрутизация. Традиционные маршрутизаторы реализуют свои функции с помощью программно-управляемых процессоров, что будем называть программной маршрутизацией. Традиционные маршрутизаторы обычно продвигают пакеты со скоростью около 500000 пакетов в секунду. Коммутаторы третьего уровня сегодня работают со скоростью до 50 миллионов пакетов в секунду. Возможно и дальнейшее ее повышение, так как каждый интерфейсный модуль, как и в коммутаторе второго уровня, оснащен собственным процессором продвижения пакетов на основе ASIC. Так что наращивание количества модулей ведет к наращиванию производительности маршрутизации. Использование высокоскоростной технологии больших заказных интегральных схем (ASIC) является главной характеристикой, отличающей коммутаторы третьего уровня от традиционных маршрутизаторов. Коммутаторы 3-го уровня делятся на две категории: пакетные (Packet-by-Packet Layer 3 Switches, PPL3) и сквозные (Cut-Through Layer 3 Switches, CTL3). PPL3 - означает просто быструю маршрутизацию (Рисунок_7). CTL3 – маршрутизацию первого пакета и коммутацию всех остальных (Рисунок 8).

У коммутатора третьего уровня, кроме реализации функций маршрутизации в специализированных интегральных схемах, имеется несколько особенностей, отличающих их от традиционных маршрутизаторов. Эти особенности отражают ориентацию коммутаторов 3-го уровня на работу, в основном, в локальных сетях, а также последствия совмещения в одном устройстве коммутации на 2-м и 3-м уровнях:
- поддержка интерфейсов и протоколов, применяемых в локальных сетях,
- усеченные функции маршрутизации,
- обязательная поддержка механизма виртуальных сетей,
- тесная интеграция функций коммутации и маршрутизации, наличие удобных для администратора операций по заданию маршрутизации между виртуальными сетями.
Наиболее "коммутаторная" версия высокоскоростной маршрутизации выглядит следующим образом (рисунок 9). Пусть коммутатор третьего уровня построен так, что в нем имеется информация о соответствии сетевых адресов (например, IP-адресов) адресам физического уровня (например, MAC-адресам) Все эти МАС-адреса обычным образом отображены в коммутационной таблице, независимо от того, принадлежат ли они данной сети или другим сетям.

Первый коммутатор, на который поступает пакет, частично выполняет функции маршрутизатора, а именно, функции фильтрации, обеспечивающие безопасность. Он решает, пропускать или нет данный пакет в другую сеть Если пакет пропускать нужно, то коммутатор по IP-адресу назначения определяет МАС-адрес узла назначения и формирует новый заголовок второго уровня с найденным МАС-адресом. Затем выполняется обычная процедура коммутации по данному МАС-адресу с просмотром адресной таблицы коммутатора. Все последующие коммутаторы, построенные по этому же принципу, обрабатывают данный кадр как обычные коммутаторы второго уровня, не привлекая функций маршрутизации, что значительно ускоряет его обработку. Однако функции маршрутизации не являются для них избыточными, поскольку и на эти коммутаторы могут поступать первичные пакеты (непосредственно от рабочих станций), для которых необходимо выполнять фильтрацию и подстановку МАС-адресов.
Это описание носит схематический характер и не раскрывает способов решения возникающих при этом многочисленных проблем, например, проблемы построения таблицы соответствия IP-адресов и МАС-адресов
Примерами коммутаторов третьего уровня, работающих по этой схеме, являются коммутаторы SmartSwitch компании Cabletron. Компания Cabletron реализовала в них свой протокол ускоренной маршрутизации SecureFast Virtual Network, SFVN.
Для организации непосредственного взаимодействия рабочих станций без промежуточного маршрутизатора необходимо сконфигурировать каждую из них так, чтобы она считала собственный интерфейс маршрутизатором по умолчанию. При такой конфигурации станция пытается самостоятельно отправить любой пакет конечному узлу, даже если этот узел находится в другой сети. Так как в общем случае (см. рисунок 10) станции неизвестен МАС-адрес узла назначения, то она генерирует соответствующий ARP-запрос, который перехватывает коммутатор, поддерживающий протокол SFVN. В сети предполагается наличие сервера SFVN Server, являющегося полноценным маршрутизатором и поддерживающего общую ARP-таблицу всех узлов SFVN-сети. Сервер возвращает коммутатору МАС-адрес узла назначения, а коммутатор, в свою очередь, передает его исходной станции. Одновременно сервер SFVN передает коммутаторам сети инструкции о разрешении прохождения пакета с МАС-адресом узла назначения через границы виртуальных сетей. Затем исходная станция передает пакет в кадре, содержащем МАС-адрес узла назначения. Этот кадр проходит через коммутаторы, не вызывая обращения к их блокам маршрутизации. Отличие протокола SFVN компании Cabletron от - описанной выше общей схемы в том, что для нахождения МАС-адреса по IP-адресу в сети используется выделенный сервер.
Протокол Fast IP компании 3Com является еще одним примером реализации подхода с отображением IP-адреса на МАС-адрес. В этом протоколе основными действующими лицами являются сетевые адаптеры (что не удивительно, так как компания 3Com является признанным лидером в производстве сетевых адаптеров Ethernet) С одной стороны, такой подход требует изменения программного обеспечения драйверов сетевых адаптеров, и это минус Но зато не требуется изменять все остальное сетевое оборудование.
При необходимости передать пакет узлу назначения другой сети, исходный узел в соответствии с технологией Fast IP должен передать запрос по протоколу NHRP (Next Hop Routing Protocol) маршрутизатору сети. Маршрутизатор переправляет этот запрос узлу назначения, как обычный пакет Узел назначения, который также поддерживает Fast IP и NHRP, получив запрос, отвечает кадром, отсылаемым уже не маршрутизатору, а непосредственно узлу-источнику (по его МАС-адресу, содержащемуся в NHRP-запросе). После этого обмен идет на канальном уровне на основе известных МАС-адресов. Таким образом, снова маршрутизировался только первый пакет потока (как на рисунке 9 кратковременный поток), а все остальные коммутировались (как на рисунке 9 долговременный поток).
Еще один тип коммутаторов третьего уровня — это коммутаторы, работающие с протоколами локальных сетей типа Ethernet и FDDI. Эти коммутаторы выполняют функции маршрутизации не так, как классические маршрутизаторы. Они маршрутизируют не отдельные пакеты, а потоки пакетов.
Поток — это последовательность пакетов, имеющих некоторые общие свойства. По меньшей мере, у них должны совпадать адрес отправителя и адрес получателя, и тогда их можно отправлять по одному и тому же маршруту. Если классический способ маршрутизации использовать только для первого пакета потока, а все остальные обрабатывать на основании опыта первого (или нескольких первых) пакетов, то можно значительно ускорить маршрутизацию всего потока.
Рассмотрим этот подход на примере технологии NetFlow компании Cisco, реализованной в ее маршрутизаторах и коммутаторах. Для каждого пакета, поступающего на порт маршрутизатора, вычисляется хэш-функция от IP-адресов источника, назначения, портов UDP или TCP и поля TOS, характеризующего требуемое качество обслуживания. Во всех маршрутизаторах, поддерживающих данную технологию, через которые проходит данный пакет, в кэш-памяти портов запоминается соответствие значения хэш-функции и адресной информации, необходимой для быстрой передачи пакета следующему маршрутизатору. Таким образом, образуется квазивиртуальный канал (см. Рисунок 11), который позволяет быстро передавать по сети маршрутизаторов все последующие пакеты этого потока. При этом ускорение достигается за счет упрощения процедуры обработки пакета маршрутизатором - не просматриваются таблицы маршрутизации, не выполняются ARP-запросы.
Этот прием может использоваться в маршрутизаторах, вообще не поддерживающих коммутацию, а может быть перенесен в коммутаторы. В этом случае такие коммутаторы тоже называют коммутаторами третьего уровня. Примеров маршрутизаторов, использующих данный подход, являются маршрутизаторы Cisco 7500, а коммутаторов третьего уровня — коммутаторы Catalyst 5000 и 5500. Коммутаторы Catalyst выполняют усеченные функции описанной схемы, они не могут обрабатывать первые пакеты потоков и создавать новые записи о хэш-функциях и адресной информации потоков. Они просто получают данную информацию от маршрутизаторов 7500 и обрабатывают пакеты уже распознанных маршрутизаторами потоков.
Выше был рассмотрен способ ускоренной маршрутизации, основанный на концепции потока. Его сущность заключается в создании квазивиртуальных каналов в сетях, которые не поддерживают виртуальные каналы в обычном понимании этого термина, то есть сетях Ethernet, FDDI, Token Ring и т п. Следует отличать этот способ от способа ускоренной работы маршрутизаторов в сетях, поддерживающих технологию виртуальных каналов — АТМ, frame relay, X 25. В таких сетях создание виртуального канала является штатным режимом работы сетевых устройств. Виртуальные каналы создаются между двумя конечными точками, причем для потоков данных, требующих разного качества обслуживания (например, для данных разных приложений) может создаваться отдельный виртуальный канал. Хотя время создания виртуального канала существенно превышает время маршрутизации одного пакета, выигрыш достигается за счет последующей быстрой передачи потока данных по виртуальному каналу. Но в таких сетях возникает другая проблема — неэффективная передача коротких потоков, то есть потоков, состоящих из небольшого количества пакетов (классический пример — пакеты протокола DNS).
Накладные расходы, связанные с созданием виртуального канала, приходящиеся на один пакет, снижаются при передаче объемных потоков данных. Однако они становятся неприемлемо высокими при передаче коротких потоков. Для того чтобы эффективно передавать короткие потоки, предлагается следующий вариант, при передаче нескольких первых пакетов выполняется обычная маршрутизация. Затем, после того как распознается устойчивый поток, для него строится виртуальный канал, и дальнейшая передача данных происходит с высокой скоростью по этому виртуальному каналу. Таким образом, для коротких потоков виртуальный канал вообще не создается, что и повышает эффективность передачи.
По такой схеме работает ставшая уже классической технология IP Switching компании Ipsilon. Для того чтобы сети коммутаторов АТМ передавали бы пакеты коротких потоков без установления виртуального канала, компания Ipsilon предложила встроить во все коммутаторы АТМ блоки IP-маршрутизации (рисунок 12), строящие обычные таблицы маршрутизации по обычным протоколам RIP и OSPF.
Компания Cisco Systems выдвинула в качестве альтернативы технологии IP Switching свою собственную технологию Tag Switching, но она не стала стандартной. В настоящее время IETF работает над стандартным протоколом обмена метками MPLS (Multi-Protocol Label Switching), который обобщает предложение компаний Ipsilon и Cisco, а также вносит некоторые новые детали и механизмы. Этот протокол ориентирован на поддержку качества обслуживания для виртуальных каналов, образованных метками.
Коммутация четвертого уровня
Свойства четвертого или транспортного уровня модели OSI следующие: транспортный уровень обеспечивает услуги по транспортировке данных. В частности, заботой транспортного уровня является решение таких вопросов, как выполнение надежной транспортировки данных через объединенную сеть. Предоставляя надежные услуги, транспортный уровень обеспечивает механизмы для установки, поддержания и упорядоченного завершения действия виртуальных каналов, систем обнаружения и устранения неисправностей транспортировки и управления информационным потоком (с целью предотвращения переполнения данными из другой системы).
Некоторые производители заявляют, что их системы могут работать на втором, третьем и даже четвертом уровнях. Однако рассмотрение описания стека TCP/IP (рисунок 1), а также структуры пакетов IP и TCP (рисунки 2, 3), показывает, что коммутация четвертого уровня является фикцией, так как все относящиеся к коммутации функции осуществляются на уровне не выше третьего. А именно, термин коммутация четвертого уровня с точки зрения описания стека TCP/IP противоречий не имеет, за исключением того, что при коммутации должны указываться адреса компьютера (маршрутизатора) источника и компьютера (маршрутизатора) получателя. Пакеты TCP имеют поля локальный порт отправителя и локальный порт получателя (рисунок 3), несущие смысл точек входа в приложение (в программу), например Telnet с одной стороны, и точки входа (в данном контексте инкапсуляции) в уровень IP. Кроме того, в стеке TCP/IP именно уровень TCP занимается формированием пакетов из потока данных идущих от приложения. Пакеты IP (рисунок 2) имеют поля адреса компьютера (маршрутизатора) источника и компьютера (маршрутизатора) получателя и следовательно могут наряду с MAC адресами использоваться для коммутации. Тем не менее, название прижилось, к тому же практика показывает, что способность системы анализировать информацию прикладного уровня может оказаться полезной — в частности для управления трафиком. Таким образом, термин "зависимый от приложения" более точно отражает функции так называемых коммутаторов четвертого уровня.


Тематики
EN
Англо-русский словарь нормативно-технической терминологии > switching technology
14 ARC
- электрическая дуга
- формуляр учёта реагирования на аварийную сигнализацию
- образовывать (электрическую) дугу
- Корпоративный исследовательский центр
- класс полномочий доступа
- дуговой разряд
- вычислительная сеть для распределенной обработки данных
- автоматическое регулирование соотношения
- автоматическое повторное включение
- автоматическое дистанционное управление
автоматическое дистанционное управление
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва]Тематики
- электротехника, основные понятия
EN
автоматическое повторное включение
АПВ
Коммутационный цикл, при котором выключатель вслед за его отключением автоматически включается через установленный промежуток времени (О - tбт - В).
[ ГОСТ Р 52565-2006]
автоматическое повторное включение
АПВ
Автоматическое включение аварийно отключившегося элемента электрической сети
[ОАО РАО "ЕЭС России" СТО 17330282.27.010.001-2008]
(автоматическое) повторное включение
АПВ
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва]EN
automatic reclosing
automatic reclosing of a circuit-breaker associated with a faulted section of a network after an interval of time which permits that section to recover from a transient fault
[IEC 61936-1, ed. 1.0 (2002-10)]
[IEV 604-02-32]
auto-reclosing
the operating sequence of a mechanical switching device whereby, following its opening, it closes automatically after a predetermined time
[IEC 62271-100, ed. 2.0 (2008-04)]
auto-reclosing (of a mechanical switching device)
the operating sequence of a mechanical switching device whereby, following its opening, it closes automatically after a predetermined time
[IEV number 441-16-10]FR
réenclenchement automatique
refermeture du disjoncteur associé à une fraction de réseau affectée d'un défaut, par un dispositif automatique après un intervalle de temps permettant la disparition d'un défaut fugitif
[IEC 61936-1, ed. 1.0 (2002-10)]
[IEV 604-02-32]
refermeture automatique
séquence de manoeuvres par laquelle, à la suite d’une ouverture, un appareil mécanique de connexion est refermé automatiquement après un intervalle de temps prédéterminé
[IEC 62271-100, ed. 2.0 (2008-04)]
refermeture automatique (d'un appareil mécanique de connexion)
séquence de manoeuvres par laquelle, à la suite d'une ouverture, un appareil mécanique de connexion est refermé automatiquement après un intervalle de temps prédéterminé
[IEV number 441-16-10]
Автоматическое повторное включение (АПВ), быстрое автоматическое обратное включение в работу высоковольтных линий электропередачи и электрооборудования высокого напряжения после их автоматического отключения; одно из наиболее эффективных средств противоаварийной автоматики. Повышает надёжность электроснабжения потребителей и восстанавливает нормальный режим работы электрической системы. Во многих случаях после быстрого отключения участка электрической системы, на котором возникло короткое замыкание в результате кратковременного нарушения изоляции или пробоя воздушного промежутка, при последующей подаче напряжения повторное короткое замыкание не возникает. АПВ выполняется с помощью автоматических устройств, воздействующих на высоковольтные выключатели после их аварийного автоматического отключения от релейной защиты. Многие из этих автоматических устройств обеспечивают АПВ при самопроизвольном отключении выключателей, например при сильных сотрясениях почвы во время близких взрывов, землетрясениях и т. п. Эффективность АПВ тем выше, чем быстрее следует оно за аварийным отключением, т. е. чем меньше время перерыва питания потребителей. Это время зависит от длительности цикла АПВ. В электрических системах применяют однократное АПВ — с одним циклом, двукратное — при неуспешном первом цикле, и трёхкратное — с тремя последовательными циклами. Цикл АПВ — время от момента подачи сигнала на отключение до замыкания цепи главными контактами выключателя — состоит из времени отключения и включения выключателя и времени срабатывания устройства АПВ. Длительность бестоковой паузы, когда потребитель не получает электроэнергию, выбирается такой, чтобы успело произойти восстановление изоляции (деионизация среды) в месте короткого замыкания, привод выключателя после отключения был бы готов к повторному включению, а выключатель к моменту замыкания его главных контактов восстановил способность к отключению поврежденной цепи в случае неуспешного АПВ. Время деионизации зависит от среды, климатических условий и других факторов. Время восстановления отключающей способности выключателя определяется его конструкцией и количеством циклов АПВ., предшествовавших данному. Обычно длительность 1-го цикла не превышает 0,5—1,5 сек, 2-го — от 10 до 15 сек, 3-го — от 60 до 120 сек.
Наиболее распространено однократное АПВ, обеспечивающее на воздушных линиях высокого напряжения (110 кв и выше) до 86 %, а на кабельных линиях (3—10 кв) — до 55 % успешных включений. Двукратное АПВ обеспечивает во втором цикле до 15 % успешных включений. Третий цикл увеличивает число успешных включений всего на 3—5 %. На линиях электропередачи высокого напряжения (от 110 до 500 кВ) применяется однофазовое АПВ; при этом выключатели должны иметь отдельные приводы на каждой фазе.
Применение АПВ экономически выгодно, т. к. стоимость устройств АПВ и их эксплуатации несравнимо меньше ущерба из-за перерыва в подаче электроэнергии.
[ БСЭ]
НАЗНАЧЕНИЕ И ОБЛАСТЬ ПРИМЕНЕНИЯ АПВ
Опыт эксплуатации сетей высокого напряжения показал, что если поврежденную линию электропередачи быстро отключить, т. е. снять с нее напряжение, то в большинстве случаев повреждение ликвидируется. При этом электрическая дуга, возникавшая в месте короткого замыкания (КЗ), не успевает вызвать существенных разрушений оборудования, препятствующих обратному включению линии под напряжение.
Самоустраняющиеся повреждения принято называть неустойчивыми. Такие повреждения возникают в результате грозовых перекрытий изоляции, схлестывания проводов при ветре и сбрасывании гололеда, падения деревьев, задевания проводов движущимися механизмами.
Данные о повреждаемости воздушных линий электропередачи (ВЛ) за многолетний период эксплуатации показывают, что доля неустойчивых повреждений весьма высока и составляет 50—90 %.
При ликвидации аварии оперативный персонал производит обычно опробование линии путем включения ее под напряжение, так как отыскание места повреждения на линии электропередачи путем ее обхода требует длительного времени, а многие повреждения носят неустойчивый характер. Эту операцию называют повторным включением.
Если КЗ самоустранилось, то линия, на которой произошло неустойчивое повреждение, при повторном включении остается в работе. Поэтому повторные включения при неустойчивых повреждениях принято называть успешными.
На ВЛ успешность повторного включения сильно зависит от номинального напряжения линий. На линиях ПО кВ и выше успешность повторного включения значительно выше, чем на ВЛ 6—35 кВ. Высокий процент успешных повторных включений в сетях высокого и сверхвысокого напряжения объясняется быстродействием релейной защиты (как правило, не более 0,1-0,15 с), большим сечением проводов и расстояний между ними, высокой механической прочностью опор. [Овчинников В. В., Автоматическое повторное включение. — М.:Энергоатомиздат, 1986.— 96 с: ил. — (Б-ка электромонтера; Вып. 587). Энергоатомиздат, 1986]
АВТОМАТИЧЕСКОЕ ПОВТОРНОЕ ВКЛЮЧЕНИЕ (АПВ)
3.3.2. Устройства АПВ должны предусматриваться для быстрого восстановления питания потребителей или межсистемных и внутрисистемных связей путем автоматического включения выключателей, отключенных устройствами релейной защиты.
Должно предусматриваться автоматическое повторное включение:
1) воздушных и смешанных (кабельно-воздушных) линий всех типов напряжением выше 1 кВ. Отказ от применения АПВ должен быть в каждом отдельном случае обоснован. На кабельных линиях 35 кВ и ниже АПВ рекомендуется применять в случаях, когда оно может быть эффективным в связи со значительной вероятностью повреждений с образованием открытой дуги (например, наличие нескольких промежуточных сборок, питание по одной линии нескольких подстанций), а также с целью исправления неселективного действия защиты. Вопрос о применении АПВ на кабельных линиях 110 кВ и выше должен решаться при проектировании в каждом отдельном случае с учетом конкретных условий;
2) шин электростанций и подстанций (см. 3.3.24 и 3.3.25);
3) трансформаторов (см. 3.3.26);
4) ответственных электродвигателей, отключаемых для обеспечения самозапуска других электродвигателей (см. 3.3.38).
Для осуществления АПВ по п. 1-3 должны также предусматриваться устройства АПВ на обходных, шиносоединительных и секционных выключателях.
Допускается в целях экономии аппаратуры выполнение устройства группового АПВ на линиях, в первую очередь кабельных, и других присоединениях 6-10 кВ. При этом следует учитывать недостатки устройства группового АПВ, например возможность отказа в случае, если после отключения выключателя одного из присоединений отключение выключателя другого присоединения происходит до возврата устройства АПВ в исходное положение.
3.3.3. Устройства АПВ должны быть выполнены так, чтобы они не действовали при:
1) отключении выключателя персоналом дистанционно или при помощи телеуправления;
2) автоматическом отключении от релейной защиты непосредственно после включения персоналом дистанционно или при помощи телеуправления;
3) отключении выключателя защитой от внутренних повреждений трансформаторов и вращающихся машин, устройствами противоаварийной автоматики, а также в других случаях отключений выключателя, когда действие АПВ недопустимо. АПВ после действия АЧР (ЧАПВ) должно выполняться в соответствии с 3.3.81.
Устройства АПВ должны быть выполнены так, чтобы была исключена возможностью многократного включения на КЗ при любой неисправности в схеме устройства.
Устройства АПВ должны выполняться с автоматическим возвратом.
3.3.4. При применении АПВ должно, как правило, предусматриваться ускорение действия релейной защиты на случай неуспешного АПВ. Ускорение действия релейной защиты после неуспешного АПВ выполняется с помощью устройства ускорения после включения выключателя, которое, как правило, должно использоваться и при включении выключателя по другим причинам (от ключа управления, телеуправления или устройства АВР). При ускорении защиты после включения выключателя должны быть приняты меры против возможного отключения выключателя защитой под действием толчка тока при включении из-за неодновременного включения фаз выключателя.
Не следует ускорять защиты после включения выключателя, когда линия уже включена под напряжение другим своим выключателем (т. е. при наличии симметричного напряжения на линии).
Допускается не ускорять после АПВ действие защит линий 35 кВ и ниже, выполненных на переменном оперативном токе, если для этого требуется значительное усложнение защит и время их действия при металлическом КЗ вблизи места установки не превосходит 1,5 с.
3.3.5. Устройства трехфазного АПВ (ТАПВ) должны осуществляться преимущественно с пуском при несоответствии между ранее поданной оперативной командой и отключенным положением выключателя; допускается также пуск устройства АПВ от защиты.
3.3.6. Могут применяться, как правило, устройства ТАПВ однократного или двукратного действия (последнее - если это допустимо по условиям работы выключателя). Устройство ТАПВ двукратного действия рекомендуется принимать для воздушных линий, в особенности для одиночных с односторонним питанием. В сетях 35 кВ и ниже устройства ТАПВ двукратного действия рекомендуется применять в первую очередь для линий, не имеющих резервирования по сети.
В сетях с изолированной или компенсированной нейтралью, как правило, должна применяться блокировка второго цикла АПВ в случае замыкания на землю после АПВ первого цикла (например, по наличию напряжений нулевой последовательности). Выдержка времени ТАПВ во втором цикле должна быть не менее 15-20 с.
3.3.7. Для ускорения восстановления нормального режима работы электропередачи выдержка времени устройства ТАПВ (в особенности для первого цикла АПВ двукратного действия на линиях с односторонним питанием) должна приниматься минимально возможной с учетом времени погасания дуги и деионизации среды в месте повреждения, а также с учетом времени готовности выключателя и его привода к повторному включению.
Выдержка времени устройства ТАПВ на линии с двусторонним питанием должна выбираться также с учетом возможного неодновременного отключения повреждения с обоих концов линии; при этом время действия защит, предназначенных для дальнего резервирования, учитываться не должно. Допускается не учитывать разновременности отключения выключателей по концам линии, когда они отключаются в результате срабатывания высокочастотной защиты.
С целью повышения эффективности ТАПВ однократного действия допускается увеличивать его выдержку времени (по возможности с учетом работы потребителя).
3.3.8. На одиночных линиях 110 кВ и выше с односторонним питанием, для которых допустим в случае неуспешного ТАПВ переход на длительную работу двумя фазами, следует предусматривать ТАПВ двукратного действия на питающем конце линии. Перевод линии на работу двумя фазами может производиться персоналом на месте или при помощи телеуправления.
Для перевода линии после неуспешного АПВ на работу двумя фазами следует предусматривать пофазное управление разъединителями или выключателями на питающем и приемном концах линии.
При переводе линии на длительную работу двумя фазами следует при необходимости принимать меры к уменьшению помех в работе линий связи из-за неполнофазного режима работы линии. С этой целью допускается ограничение мощности, передаваемой по линии в неполнофазном режиме (если это возможно по условиям работы потребителя).
В отдельных случаях при наличии специального обоснования допускается также перерыв в работе линии связи на время неполнофазного режима.
3.3.9. На линиях, отключение которых не приводит к нарушению электрической связи между генерирующими источниками, например на параллельных линиях с односторонним питанием, следует устанавливать устройства ТАПВ без проверки синхронизма.
3.3.10. На одиночных линиях с двусторонним питанием (при отсутствии шунтирующих связей) должен предусматриваться один из следующих видов трехфазного АПВ (или их комбинаций):
а) быстродействующее ТАПВ (БАПВ)
б) несинхронное ТАПВ (НАПВ);
в) ТАПВ с улавливанием синхронизма (ТАПВ УС).
Кроме того, может предусматриваться однофазное АПВ (ОАПВ) в сочетании с различными видами ТАПВ, если выключатели оборудованы пофазным управлением и не нарушается устойчивость параллельной работы частей энергосистемы в цикле ОАПВ.
Выбор видов АПВ производится, исходя из совокупности конкретных условий работы системы и оборудования с учетом указаний 3.3.11-3.3.15.
3.3.11. Быстродействующее АПВ, или БАПВ (одновременное включение с минимальной выдержкой времени с обоих концов), рекомендуется предусматривать на линиях по 3.3.10 для автоматического повторного включения, как правило, при небольшом расхождении угла между векторами ЭДС соединяемых систем. БАПВ может применяться при наличии выключателей, допускающих БАПВ, если после включения обеспечивается сохранение синхронной параллельной работы систем и максимальный электромагнитный момент синхронных генераторов и компенсаторов меньше (с учетом необходимого запаса) электромагнитного момента, возникающего при трехфазном КЗ на выводах машины.
Оценка максимального электромагнитного момента должна производиться для предельно возможного расхождения угла за время БАПВ. Соответственно запуск БАПВ должен производиться лишь при срабатывании быстродействующей защиты, зона действия которой охватывает всю линию. БАПВ должно блокироваться при срабатывании резервных защит и блокироваться или задерживаться при работе УРОВ.
Если для сохранения устойчивости энергосистемы при неуспешном БАПВ требуется большой объем воздействий от противоаварийной автоматики, применение БАПВ не рекомендуется.
3.3.12. Несинхронное АПВ (НАПВ) может применяться на линиях по 3.3.10 (в основном 110-220 кВ), если:
а) максимальный электромагнитный момент синхронных генераторов и компенсаторов, возникающий при несинхронном включении, меньше (с учетом необходимого запаса) электромагнитного момента, возникающего при трехфазном КЗ на выводах машины, при этом в качестве практических критериев оценки допустимости НАПВ принимаются расчетные начальные значения периодических составляющих токов статора при угле включения 180°;
б) максимальный ток через трансформатор (автотрансформатор) при угле включения 180° меньше тока КЗ на его выводах при питании от шин бесконечной мощности;
в) после АПВ обеспечивается достаточно быстрая ресинхронизация; если в результате несинхронного автоматического повторного включения возможно возникновение длительного асинхронного хода, должны применяться специальные мероприятия для его предотвращения или прекращения.
При соблюдении этих условий НАПВ допускается применять также в режиме ремонта на параллельных линиях.
При выполнении НАПВ необходимо принять меры по предотвращению излишнего срабатывания защиты. С этой целью рекомендуется, в частности, осуществлять включение выключателей при НАПВ в определенной последовательности, например выполнением АПВ с одной из сторон линии с контролем наличия напряжения на ней после успешного ТАПВ с противоположной стороны.
3.3.13. АПВ с улавливанием синхронизма может применяться на линиях по 3.3.10 для включения линии при значительных (примерно до 4%) скольжениях и допустимом угле.
Возможно также следующее выполнение АПВ. На конце линии, который должен включаться первым, производится ускоренное ТАПВ (с фиксацией срабатывания быстродействующей защиты, зона действия которой охватывает всю линию) без контроля напряжения на линии (УТАПВ БК) или ТАПВ с контролем отсутствия напряжения на линии (ТАПВ ОН), а на другом ее конце - ТАПВ с улавливанием синхронизма. Последнее производится при условии, что включение первого конца было успешным (это может быть определено, например, при помощи контроля наличия напряжения на линии).
Для улавливания синхронизма могут применяться устройства, построенные по принципу синхронизатора с постоянным углом опережения.
Устройства АПВ следует выполнять так, чтобы имелась возможность изменять очередность включения выключателей по концам линии.
При выполнении устройства АПВ УС необходимо стремиться к обеспечению его действия при возможно большей разности частот. Максимальный допустимый угол включения при применении АПВ УС должен приниматься с учетом условий, указанных в 3.3.12. При применении устройства АПВ УС рекомендуется его использование для включения линии персоналом (полуавтоматическая синхронизация).
3.3.14. На линиях, оборудованных трансформаторами напряжения, для контроля отсутствия напряжения (КОН) и контроля наличия напряжения (КНН) на линии при различных видах ТАПВ рекомендуется использовать органы, реагирующие на линейное (фазное) напряжение и на напряжения обратной и нулевой последовательностей. В некоторых случаях, например на линиях без шунтирующих реакторов, можно не использовать напряжение нулевой последовательности.
3.3.15. Однофазное автоматическое повторное включение (ОАПВ) может применяться только в сетях с большим током замыкания на землю. ОАПВ без автоматического перевода линии на длительный неполнофазный режим при устойчивом повреждении фазы следует применять:
а) на одиночных сильно нагруженных межсистемных или внутрисистемных линиях электропередачи;
б) на сильно нагруженных межсистемных линиях 220 кВ и выше с двумя и более обходными связями при условии, что отключение одной из них может привести к нарушению динамической устойчивости энергосистемы;
в) на межсистемных и внутрисистемных линиях разных классов напряжения, если трехфазное отключение линии высшего напряжения может привести к недопустимой перегрузке линий низшего напряжения с возможностью нарушения устойчивости энергосистемы;
г) на линиях, связывающих с системой крупные блочные электростанции без значительной местной нагрузки;
д) на линиях электропередачи, где осуществление ТАПВ сопряжено со значительным сбросом нагрузки вследствие понижения напряжения.
Устройство ОАПВ должно выполняться так, чтобы при выводе его из работы или исчезновении питания автоматически осуществлялся перевод действия защит линии на отключение трех фаз помимо устройства.
Выбор поврежденных фаз при КЗ на землю должен осуществляться при помощи избирательных органов, которые могут быть также использованы в качестве дополнительной быстродействующей защиты линии в цикле ОАПВ, при ТАПВ, БАПВ и одностороннем включении линии оперативным персоналом.
Выдержка временем ОАПВ должна отстраиваться от времени погасания дуги и деионизации среды в месте однофазного КЗ в неполнофазном режиме с учетом возможности неодновременного срабатывания защиты по концам линии, а также каскадного действия избирательных органов.
3.3.16. На линиях по 3.3.15 ОАПВ должно применяться в сочетании с различными видами ТАПВ. При этом должна быть предусмотрена возможность запрета ТАПВ во всех случаях ОАПВ или только при неуспешном ОАПВ. В зависимости от конкретных условий допускается осуществление ТАПВ после неуспешного ОАПВ. В этих случаях предусматривается действие ТАПВ сначала на одном конце линии с контролем отсутствия напряжения на линии и с увеличенной выдержкой времени.
3.3.17. На одиночных линиях с двусторонним питанием, связывающих систему с электростанцией небольшой мощности, могут применяться ТАПВ с автоматической самосинхронизацией (АПВС) гидрогенераторов для гидроэлектростанций и ТАПВ в сочетании с делительными устройствами - для гидро- и теплоэлектростанций.
3.3.18. На линиях с двусторонним питанием при наличии нескольких обходных связей следует применять:
1) при наличии двух связей, а также при наличии трех связей, если вероятно одновременное длительное отключение двух из этих связей (например, двухцепной линии):
несинхронное АПВ (в основном для линий 110-220 кВ и при соблюдении условий, указанных в 3.3.12, но для случая отключения всех связей);
АПВ с проверкой синхронизма (при невозможности выполнения несинхронного АПВ по причинам, указанным в 3.3.12, но для случая отключения всех связей).
Для ответственных линий при наличии двух связей, а также при наличии трех связей, две из которых - двухцепная линия, при невозможности применения НАПВ по причинам, указанным в 3.3.12, разрешается применять устройства ОАПВ, БАПВ или АПВ УС (см. 3.3.11, 3.3.13, 3.3.15). При этом устройства ОАПВ и БАПВ следует дополнять устройством АПВ с проверкой синхронизма;
2) при наличии четырех и более связей, а также при наличии трех связей, если в последнем случае одновременное длительное отключение двух из этих связей маловероятно (например, если все линии одноцепные), - АПВ без проверки синхронизма.
3.3.19. Устройства АПВ с проверкой синхронизма следует выполнять на одном конце линии с контролем отсутствия напряжения на линии и с контролем наличия синхронизма, на другом конце - только с контролем наличия синхронизма. Схемы устройства АПВ с проверкой синхронизма линии должны выполняться одинаковыми на обоих концах с учетом возможности изменения очередности включения выключателей линии при АПВ.
Рекомендуется использовать устройство АПВ с проверкой синхронизма для проверки синхронизма соединяемых систем при включении линии персоналом.
3.3.20. Допускается совместное применение нескольких видов трехфазного АПВ на линии, например БАПВ и ТАПВ с проверкой синхронизма. Допускается также использовать различные виды устройств АПВ на разных концах линии, например УТАПВ БК (см. 3.3.13) на одном конце линии и ТАПВ с контролем наличия напряжения и синхронизма на другом.
3.3.21. Допускается сочетание ТАПВ с неселективными быстродействующими защитами для исправления неселективного действия последних. В сетях, состоящих из ряда последовательно включенных линий, при применении для них неселективных быстродействующих защит для исправления их действия рекомендуется применять поочередное АПВ; могут также применяться устройства АПВ с ускорением защиты до АПВ или с кратностью действия (не более трех), возрастающей по направлению к источнику питания.
3.3.22. При применении трехфазного однократного АПВ линий, питающих трансформаторы, со стороны высшего напряжения которых устанавливаются короткозамыкатели и отделители, для отключения отделителя в бестоковую паузу время действия устройства АПВ должно быть отстроено от суммарного времени включения короткозамыкателя и отключения отделителя. При применении трехфазного АПВ двукратного действия (см. 3.3.6) время действия АПВ в первом цикле по указанному условию не должно увеличиваться, если отключение отделителя предусматривается в бестоковую паузу второго цикла АПВ.
Для линий, на которые вместо выключателей устанавливаются отделители, отключение отделителей в случае неуспешного АПВ в первом цикле должно производиться в бестоковую паузу второго цикла АПВ.
3.3.23. Если в результате действия АПВ возможно несинхронное включение синхронных компенсаторов или синхронных электродвигателей и если такое включение для них недопустимо, а также для исключения подпитки от этих машин места повреждения следует предусматривать автоматическое отключение этих синхронных машин при исчезновении питания или переводить их в асинхронный режим отключением АГП с последующим автоматическим включением или ресинхронизацией после восстановления напряжения в результате успешного АПВ.
Для подстанций с синхронными компенсаторами или синхронными электродвигателями должны применяться меры, предотвращающие излишние срабатывания АЧР при действии АПВ.
3.3.24. АПВ шин электростанций и подстанций при наличии специальной защиты шин и выключателей, допускающих АПВ, должно выполняться по одному из двух вариантов:
1) автоматическим опробованием (постановка шин под напряжение выключателем от АПВ одного из питающих элементов);
2) автоматической сборкой схемы; при этом первым от устройства АПВ включается один из питающих элементов (например, линия, трансформатор), при успешном включении этого элемента производится последующее, возможно более полное автоматическое восстановление схемы доаварийного режима путем включения других элементов. АПВ шин по этому варианту рекомендуется применять в первую очередь для подстанций без постоянного дежурства персонала.
При выполнении АПВ шин должны применяться меры, исключающие несинхронное включение (если оно является недопустимым).
Должна обеспечиваться достаточная чувствительность защиты шин на случай неуспешного АПВ.
3.3.25. На двухтрансформаторных понижающих подстанциях при раздельной работе трансформаторов, как правило, должны предусматриваться устройства АПВ шин среднего и низшего напряжений в сочетании с устройствами АВР; при внутренних повреждениях трансформаторов должно действовать АВР, при прочих повреждениях - АПВ (см. 3.3.42).
Допускается для двухтрансформаторной подстанции, в нормальном режиме которой предусматривается параллельная работа трансформаторов на шинах данного напряжения, устанавливать дополнительно к устройству АПВ устройство АВР, предназначенное для режима, когда один из трансформаторов выведен в резерв.
3.3.26. Устройствами АПВ должны быть оборудованы все одиночные понижающие трансформаторы мощностью более 1 MB·А на подстанциях энергосистем, имеющие выключатель и максимальную токовую защиту с питающей стороны, когда отключение трансформатора приводит к обесточению электроустановок потребителей. Допускается в отдельных случаях действие АПВ и при отключении трансформатора защитой от внутренних повреждений.
3.3.27. При неуспешном АПВ включаемого первым выключателем элемента, присоединенного двумя или более выключателями, АПВ остальных выключателей этого элемента, как правило, должно запрещаться.
3.3.28. При наличии на подстанции или электростанции выключателей с электромагнитным приводом, если от устройства АПВ могут быть одновременно включены два или более выключателей, для обеспечения необходимого уровня напряжения аккумуляторной батареи при включении и для снижения сечения кабелей цепей питания электромагнитов включения следует, как правило, выполнять АПВ так, чтобы одновременное включение нескольких выключателей было исключено (например, применением на присоединениях АПВ с различными выдержками времени).
Допускается в отдельных случаях (преимущественно при напряжении 110 кВ и большом числе присоединений, оборудованных АПВ) одновременное включение от АПВ двух выключателей.
3.3.29. Действие устройств АПВ должно фиксироваться указательными реле, встроенными в реле указателями срабатывания, счетчиками числа срабатываний или другими устройствами аналогичного назначения.
[ ПУЭ]Тематики
- высоковольтный аппарат, оборудование...
- релейная защита
- электроснабжение в целом
Обобщающие термины
Синонимы
Сопутствующие термины
- АПВ воздушных линий
- АПВ смешанных (кабельно-воздушных) линий
- двукратное АПВ
- неуспешное АПВ
- однократное АПВ
- трехкратное АПВ
- цикл АПВ
EN
- AR
- ARC
- auto-reclosing
- automatic reclosing
- automatic recluse
- autoreclosing
- autoreclosure
- reclose
- reclosing
- reclosure
DE
- automatische Wiedereinschaltung
- Kurzunterbrechung
- selbsttätiges Wiederschließen (eines mechanischen Schaltgerätes)
- Wiedereinschaltung, automatische
FR
автоматическое регулирование соотношения
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
вычислительная сеть для распределенной обработки данных
Разработана фирмой Datapoint Corp. (США).
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
EN
дуговой разряд
Самостоятельный электрический разряд, при котором электрическое поле в разрядном промежутке определяется в основном величиной и расположением в нем объемных зарядов и который характеризуется малым катодным падением потенциала (порядка или меньше ионизационного потенциала газа), а также интенсивным испусканием электронов катодом в основном благодаря термоэлектронной или электростатической эмиссии.
[ ГОСТ 13820-77]
дуговой разряд
-
[Лугинский Я. Н. и др. Англо-русский словарь по электротехнике и электроэнергетике. 2-е издание - М.: РУССО, 1995 - 616 с.]Тематики
EN
Корпоративный исследовательский центр
(компании «Бэбкок энд Вилкокс», США)
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
класс полномочий доступа
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
EN
образовывать (электрическую) дугу
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва]Тематики
- электротехника, основные понятия
EN
формуляр учёта реагирования на аварийную сигнализацию
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
электрическая дуга
-
[Интент]EN
(electric) arc
self-maintained gas conduction for which most of the charge carriers are electrons supplied by primary‑electron emission
[IEV ref 121-13-12]FR
arc (électrique), m
conduction gazeuse autonome dans laquelle la plupart des porteurs de charge sont des électrons produits par émission électronique primaire
[IEV ref 121-13-12]-
Материалы, стойкие к воздействию электрической дуги, используемые в качестве защитных средств, должны быть несгораемыми, иметь низкую теплопроводность и достаточную толщину для обеспечения механической стойкости.
[ ГОСТ Р 50571. 4-94 ( МЭК 364-4-42-80)] -
Средства индивидуальной защиты от теплового воздействия электрической дуги...
[Технический регламент о безопасности средств индивидуальной защиты] -
Опасное и вредное воздействия на людей электрического тока, электрической дуги и электромагнитных полей проявляются в виде электротравм и профессиональных заболеваний.
[ ГОСТ 12.1.019-79] -
сопротивление электрической дуги в месте КЗ
[ ГОСТ 28249-93 ] -
... способствовать гашению электрической дуги
-
Аппараты управления, имеющие электрическую дугу на силовых контактах при
нормальной работе ( пускатели, станции управления), должны проходить испытания при коммутации нагрузки.
[ ГОСТ Р 51330.20-99]
An electric arc is an electrical breakdown of a gas which produces an ongoing plasma discharge, resulting from a current flowing through normally nonconductive media such as air. A synonym is arc discharge. An arc discharge is characterized by a lower voltage than a glow discharge, and relies on thermionic emission of electrons from the electrodes supporting the arc. The phenomenon was first described by Vasily V. Petrov, a Russian scientist who discovered it in 1802. An archaic term is voltaic arc as used in the phrase " voltaic arc lamp".
[http://en.wikipedia.org/wiki/Electric_arc]Параллельные тексты EN-RU
In the last years a lot of users have underlined the question of safety in electrical assemblies with reference to one of the most severe and destructive electrophysical phenomenon: the electric arc.
[ABB]В последние годы многие потребители обращают особое внимание на безопасность НКУ, связанную с чрезвычайно разрушительным и наиболее жестко действующим электрофизическим явлением - электрической дугой.
[Перевод Интент]Тематики
- электротехника, основные понятия
Действия
Сопутствующие термины
EN
DE
- elektrischer Lichtbogen, m
- Lichtbogen, m
FR
Англо-русский словарь нормативно-технической терминологии > ARC
15 waterworks
- водохозяйственный объект
- водохозяйственные мероприятия
- водохозяйственная система
- водопроводная насосная станция
- водоочистное предприятие
водоочистное предприятие
—
[ http://www.eionet.europa.eu/gemet/alphabetic?langcode=en]EN
waterworks
Plant for treating and purifying water before it is pumped into pipes for distribution to houses, factories, schools, etc. (Source: PHC)
[http://www.eionet.europa.eu/gemet/alphabetic?langcode=en]Тематики
EN
DE
FR
водопроводная насосная станция
Сооружение водопровода, оборудованное насосно-силовой установкой для подъема и подачи воды в водоводы и водопроводную сеть.
[ ГОСТ 25151-82]
По своему назначению и расположению в общей схеме водоснабжения водопроводные насосные станции подразделяются:- на станции первого подъема, второго и последующих подъемов;
- повысительные;
-
циркуляционные.
Насосные станции первого подъема забирают воду из источника и подают ее на очистные сооружения или, если не требуется очистка воды, в аккумулирующие емкости (резервуары чистой воды, водонапорные башни, гидропневматические баки), а в некоторых случаях непосредственно в распределительную сеть.Насосные станции второго подъема подают воду потребителям из резервуаров чистой воды, которые позволяют регулировать подачу.Повысительные насосные станции предназначены для повышения напора на участке сети или в водоводе.Циркуляционные насосные станции входят в замкнутые системы технического водоснабжения промышленных предприятий и тепловых электростанций. По степени обеспеченности подачи воды насосные станции подразделяются на три категории:- Первая категория допускает перерыв в подаче только на время (не более 10 мин), необходимое для выключения поврежденного и включения резервных элементов (оборудования, арматуры, трубопроводов), и снижение подачи на хозяйственно-питьевые нужды не более 30 % расчетного расхода и на производственные нужды до предела, установленного аварийным графиком работы предприятий.
- Вторая категория допускает перерыв в подаче для проведения ремонта не более чем на 6 ч.
-
Третья категория допускает перерыв в подаче не более чем на 24 ч и соответствующее снижение подачи не более чем на 15 сут.
К первой категории относятся насосные станции, обслуживающие технический водопровод; системы водоснабжения населенных пунктов с числом жителей свыше 50 000 чел, подающие воду непосредственно в сеть противопожарного и объединенного хозяйственно-противопожарного водопровода.Ко второй категории относятся насосные станции, обслуживающие водопровод населенных пунктов с числом жителей от 5000 до 50 000 чел., если подача воды на пожаротушение возможна и при временной остановке этих станций; насосные станции водопроводов населенных пунктов с числом жителей до 500 чел. и других объектов, указанных в нормах.К третьей категории относятся насосные станции поливочных водопроводов. При проектировании режим работы насосных станций первого подъема увязывают с работой водозаборных сооружений и камер переключений, а насосных станций второго подъема - с резервуарами чистой воды и системой их обслуживания. Насосные станции первого подъема бывают раздельного типа, когда водозаборное сооружение отделено от здания насосной станции, и совмещенного типа, когда машинный зал насосной станции объединяется в одну конструкцию с водоприемником. В зависимости от типа насосного оборудования различают насосные станции с горизонтальными и вертикальными центробежными и осевыми насосами. По расположению насосов относительно уровня воды в водоеме, приемном резервуаре или резервуаре чистой воды различают станции: с насосами, установленными с положительной высотой всасывания; с насосами, установленными под напором (под залив). По расположению машинного зала относительно поверхности земли насосные станции бывают:В наземных насосных станциях отметка пола машинного зала определяется планировочными отметками окружающей землиВ полузаглубленных насосных станциях пол машинного зала заглублен по отношению к поверхности окружающей земли. Особенностью таких станций является отсутствие перекрытия между первым этажом и машинным залом.Особенностью заглубленных насосных станций является наличие перекрытия между машинным залом и первым этажом. При большом заглублении насосных станций (шахтный тип) между машинным залом и поверхностью земли могут устраиваться дополнительные подземные этажи, на которых располагается вспомогательное оборудование.Подземные насосные станции расположены полностью под землей и, как правило, не имеют надземной части (верхнего строения).По форме подземной части в плане насосные станции могут быть:прямоугольными, круглыми, эллиптическими.По характеру управления насосные станции могут быть: с ручным управлением, автоматические, полуавтоматические, с дистанционным управлением.
[Журба М. Г., Соколов Л. И., Говорова Ж. М. Водоснабжение: Проектирование систем и сооружений. Учебник. - М.: АСВ, 2003.]Тематики
EN
водохозяйственная система
Комплекс взаимосвязанных водных объектов и гидротехнических сооружений, предназначенных для обеспечения рационального использования и охраны вод.
[ ГОСТ 17.1.1.01-77]
[ ГОСТ Р 51657-1-2000]Тематики
EN
- hydrologic system
- water economy system
- water management system
- water resources system
- water system
- waterworks
- waterworks facility
DE
FR
- systéme d`aménagement d`eau
водохозяйственные мероприятия
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
водохозяйственный объект
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > waterworks
16 water pumping station
водопроводная насосная станция
Сооружение водопровода, оборудованное насосно-силовой установкой для подъема и подачи воды в водоводы и водопроводную сеть.
[ ГОСТ 25151-82]
По своему назначению и расположению в общей схеме водоснабжения водопроводные насосные станции подразделяются:- на станции первого подъема, второго и последующих подъемов;
- повысительные;
-
циркуляционные.
Насосные станции первого подъема забирают воду из источника и подают ее на очистные сооружения или, если не требуется очистка воды, в аккумулирующие емкости (резервуары чистой воды, водонапорные башни, гидропневматические баки), а в некоторых случаях непосредственно в распределительную сеть.Насосные станции второго подъема подают воду потребителям из резервуаров чистой воды, которые позволяют регулировать подачу.Повысительные насосные станции предназначены для повышения напора на участке сети или в водоводе.Циркуляционные насосные станции входят в замкнутые системы технического водоснабжения промышленных предприятий и тепловых электростанций. По степени обеспеченности подачи воды насосные станции подразделяются на три категории:- Первая категория допускает перерыв в подаче только на время (не более 10 мин), необходимое для выключения поврежденного и включения резервных элементов (оборудования, арматуры, трубопроводов), и снижение подачи на хозяйственно-питьевые нужды не более 30 % расчетного расхода и на производственные нужды до предела, установленного аварийным графиком работы предприятий.
- Вторая категория допускает перерыв в подаче для проведения ремонта не более чем на 6 ч.
-
Третья категория допускает перерыв в подаче не более чем на 24 ч и соответствующее снижение подачи не более чем на 15 сут.
К первой категории относятся насосные станции, обслуживающие технический водопровод; системы водоснабжения населенных пунктов с числом жителей свыше 50 000 чел, подающие воду непосредственно в сеть противопожарного и объединенного хозяйственно-противопожарного водопровода.Ко второй категории относятся насосные станции, обслуживающие водопровод населенных пунктов с числом жителей от 5000 до 50 000 чел., если подача воды на пожаротушение возможна и при временной остановке этих станций; насосные станции водопроводов населенных пунктов с числом жителей до 500 чел. и других объектов, указанных в нормах.К третьей категории относятся насосные станции поливочных водопроводов. При проектировании режим работы насосных станций первого подъема увязывают с работой водозаборных сооружений и камер переключений, а насосных станций второго подъема - с резервуарами чистой воды и системой их обслуживания. Насосные станции первого подъема бывают раздельного типа, когда водозаборное сооружение отделено от здания насосной станции, и совмещенного типа, когда машинный зал насосной станции объединяется в одну конструкцию с водоприемником. В зависимости от типа насосного оборудования различают насосные станции с горизонтальными и вертикальными центробежными и осевыми насосами. По расположению насосов относительно уровня воды в водоеме, приемном резервуаре или резервуаре чистой воды различают станции: с насосами, установленными с положительной высотой всасывания; с насосами, установленными под напором (под залив). По расположению машинного зала относительно поверхности земли насосные станции бывают:В наземных насосных станциях отметка пола машинного зала определяется планировочными отметками окружающей землиВ полузаглубленных насосных станциях пол машинного зала заглублен по отношению к поверхности окружающей земли. Особенностью таких станций является отсутствие перекрытия между первым этажом и машинным залом.Особенностью заглубленных насосных станций является наличие перекрытия между машинным залом и первым этажом. При большом заглублении насосных станций (шахтный тип) между машинным залом и поверхностью земли могут устраиваться дополнительные подземные этажи, на которых располагается вспомогательное оборудование.Подземные насосные станции расположены полностью под землей и, как правило, не имеют надземной части (верхнего строения).По форме подземной части в плане насосные станции могут быть:прямоугольными, круглыми, эллиптическими.По характеру управления насосные станции могут быть: с ручным управлением, автоматические, полуавтоматические, с дистанционным управлением.
[Журба М. Г., Соколов Л. И., Говорова Ж. М. Водоснабжение: Проектирование систем и сооружений. Учебник. - М.: АСВ, 2003.]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > water pumping station
17 water station
водопроводная насосная станция
Сооружение водопровода, оборудованное насосно-силовой установкой для подъема и подачи воды в водоводы и водопроводную сеть.
[ ГОСТ 25151-82]
По своему назначению и расположению в общей схеме водоснабжения водопроводные насосные станции подразделяются:- на станции первого подъема, второго и последующих подъемов;
- повысительные;
-
циркуляционные.
Насосные станции первого подъема забирают воду из источника и подают ее на очистные сооружения или, если не требуется очистка воды, в аккумулирующие емкости (резервуары чистой воды, водонапорные башни, гидропневматические баки), а в некоторых случаях непосредственно в распределительную сеть.Насосные станции второго подъема подают воду потребителям из резервуаров чистой воды, которые позволяют регулировать подачу.Повысительные насосные станции предназначены для повышения напора на участке сети или в водоводе.Циркуляционные насосные станции входят в замкнутые системы технического водоснабжения промышленных предприятий и тепловых электростанций. По степени обеспеченности подачи воды насосные станции подразделяются на три категории:- Первая категория допускает перерыв в подаче только на время (не более 10 мин), необходимое для выключения поврежденного и включения резервных элементов (оборудования, арматуры, трубопроводов), и снижение подачи на хозяйственно-питьевые нужды не более 30 % расчетного расхода и на производственные нужды до предела, установленного аварийным графиком работы предприятий.
- Вторая категория допускает перерыв в подаче для проведения ремонта не более чем на 6 ч.
-
Третья категория допускает перерыв в подаче не более чем на 24 ч и соответствующее снижение подачи не более чем на 15 сут.
К первой категории относятся насосные станции, обслуживающие технический водопровод; системы водоснабжения населенных пунктов с числом жителей свыше 50 000 чел, подающие воду непосредственно в сеть противопожарного и объединенного хозяйственно-противопожарного водопровода.Ко второй категории относятся насосные станции, обслуживающие водопровод населенных пунктов с числом жителей от 5000 до 50 000 чел., если подача воды на пожаротушение возможна и при временной остановке этих станций; насосные станции водопроводов населенных пунктов с числом жителей до 500 чел. и других объектов, указанных в нормах.К третьей категории относятся насосные станции поливочных водопроводов. При проектировании режим работы насосных станций первого подъема увязывают с работой водозаборных сооружений и камер переключений, а насосных станций второго подъема - с резервуарами чистой воды и системой их обслуживания. Насосные станции первого подъема бывают раздельного типа, когда водозаборное сооружение отделено от здания насосной станции, и совмещенного типа, когда машинный зал насосной станции объединяется в одну конструкцию с водоприемником. В зависимости от типа насосного оборудования различают насосные станции с горизонтальными и вертикальными центробежными и осевыми насосами. По расположению насосов относительно уровня воды в водоеме, приемном резервуаре или резервуаре чистой воды различают станции: с насосами, установленными с положительной высотой всасывания; с насосами, установленными под напором (под залив). По расположению машинного зала относительно поверхности земли насосные станции бывают:В наземных насосных станциях отметка пола машинного зала определяется планировочными отметками окружающей землиВ полузаглубленных насосных станциях пол машинного зала заглублен по отношению к поверхности окружающей земли. Особенностью таких станций является отсутствие перекрытия между первым этажом и машинным залом.Особенностью заглубленных насосных станций является наличие перекрытия между машинным залом и первым этажом. При большом заглублении насосных станций (шахтный тип) между машинным залом и поверхностью земли могут устраиваться дополнительные подземные этажи, на которых располагается вспомогательное оборудование.Подземные насосные станции расположены полностью под землей и, как правило, не имеют надземной части (верхнего строения).По форме подземной части в плане насосные станции могут быть:прямоугольными, круглыми, эллиптическими.По характеру управления насосные станции могут быть: с ручным управлением, автоматические, полуавтоматические, с дистанционным управлением.
[Журба М. Г., Соколов Л. И., Говорова Ж. М. Водоснабжение: Проектирование систем и сооружений. Учебник. - М.: АСВ, 2003.]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > water station
18 water supply plant
водопроводная насосная станция
Сооружение водопровода, оборудованное насосно-силовой установкой для подъема и подачи воды в водоводы и водопроводную сеть.
[ ГОСТ 25151-82]
По своему назначению и расположению в общей схеме водоснабжения водопроводные насосные станции подразделяются:- на станции первого подъема, второго и последующих подъемов;
- повысительные;
-
циркуляционные.
Насосные станции первого подъема забирают воду из источника и подают ее на очистные сооружения или, если не требуется очистка воды, в аккумулирующие емкости (резервуары чистой воды, водонапорные башни, гидропневматические баки), а в некоторых случаях непосредственно в распределительную сеть.Насосные станции второго подъема подают воду потребителям из резервуаров чистой воды, которые позволяют регулировать подачу.Повысительные насосные станции предназначены для повышения напора на участке сети или в водоводе.Циркуляционные насосные станции входят в замкнутые системы технического водоснабжения промышленных предприятий и тепловых электростанций. По степени обеспеченности подачи воды насосные станции подразделяются на три категории:- Первая категория допускает перерыв в подаче только на время (не более 10 мин), необходимое для выключения поврежденного и включения резервных элементов (оборудования, арматуры, трубопроводов), и снижение подачи на хозяйственно-питьевые нужды не более 30 % расчетного расхода и на производственные нужды до предела, установленного аварийным графиком работы предприятий.
- Вторая категория допускает перерыв в подаче для проведения ремонта не более чем на 6 ч.
-
Третья категория допускает перерыв в подаче не более чем на 24 ч и соответствующее снижение подачи не более чем на 15 сут.
К первой категории относятся насосные станции, обслуживающие технический водопровод; системы водоснабжения населенных пунктов с числом жителей свыше 50 000 чел, подающие воду непосредственно в сеть противопожарного и объединенного хозяйственно-противопожарного водопровода.Ко второй категории относятся насосные станции, обслуживающие водопровод населенных пунктов с числом жителей от 5000 до 50 000 чел., если подача воды на пожаротушение возможна и при временной остановке этих станций; насосные станции водопроводов населенных пунктов с числом жителей до 500 чел. и других объектов, указанных в нормах.К третьей категории относятся насосные станции поливочных водопроводов. При проектировании режим работы насосных станций первого подъема увязывают с работой водозаборных сооружений и камер переключений, а насосных станций второго подъема - с резервуарами чистой воды и системой их обслуживания. Насосные станции первого подъема бывают раздельного типа, когда водозаборное сооружение отделено от здания насосной станции, и совмещенного типа, когда машинный зал насосной станции объединяется в одну конструкцию с водоприемником. В зависимости от типа насосного оборудования различают насосные станции с горизонтальными и вертикальными центробежными и осевыми насосами. По расположению насосов относительно уровня воды в водоеме, приемном резервуаре или резервуаре чистой воды различают станции: с насосами, установленными с положительной высотой всасывания; с насосами, установленными под напором (под залив). По расположению машинного зала относительно поверхности земли насосные станции бывают:В наземных насосных станциях отметка пола машинного зала определяется планировочными отметками окружающей землиВ полузаглубленных насосных станциях пол машинного зала заглублен по отношению к поверхности окружающей земли. Особенностью таких станций является отсутствие перекрытия между первым этажом и машинным залом.Особенностью заглубленных насосных станций является наличие перекрытия между машинным залом и первым этажом. При большом заглублении насосных станций (шахтный тип) между машинным залом и поверхностью земли могут устраиваться дополнительные подземные этажи, на которых располагается вспомогательное оборудование.Подземные насосные станции расположены полностью под землей и, как правило, не имеют надземной части (верхнего строения).По форме подземной части в плане насосные станции могут быть:прямоугольными, круглыми, эллиптическими.По характеру управления насосные станции могут быть: с ручным управлением, автоматические, полуавтоматические, с дистанционным управлением.
[Журба М. Г., Соколов Л. И., Говорова Ж. М. Водоснабжение: Проектирование систем и сооружений. Учебник. - М.: АСВ, 2003.]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > water supply plant
19 power management
контроль потребления электроэнергии
контроль энергопотребления
—
[Интент]Тематики
Синонимы
EN
управление электропитанием
-
[Интент]
Управление электропитанием ЦОД
Автор: Жилкина Наталья
Опубликовано 23 апреля 2009 года
Источники бесперебойного питания, функционирующие в ЦОД, составляют важный элемент общей системы его энергообеспечения. Вписываясь в контур управления ЦОД, система мониторинга и управления ИБП становится ядром для реализации эксплуатационных функций.
Три задачи
Системы мониторинга, диагностики и управления питанием нагрузки решают три основные задачи: позволяют ИБП выполнять свои функции, оповещать персонал о происходящих с ними событиях и посылать команды для автоматического завершения работы защищаемого устройства.
Мониторинг параметров ИБП предполагает отображение и протоколирование состояния устройства и всех событий, связанных с его изменением. Диагностика реализуется функциями самотестирования системы. Управляющие же функции предполагают активное вмешательство в логику работы устройства.Многие специалисты этого рынка, отмечая важность процедуры мониторинга, считают, что управление должно быть сведено к минимуму. «Функция управления ИБП тоже нужна, но скорее факультативно, — говорит Сергей Ермаков, технический директор компании Inelt и эксперт в области систем Chloride. — Я глубоко убежден, что решения об активном управляющем вмешательстве в работу систем защиты электропитания ответственной нагрузки должен принимать человек, а не автоматизированная система. Завершение работы современных мощных серверов, на которых функционируют ответственные приложения, — это, как правило, весьма длительный процесс. ИБП зачастую не способны обеспечивать необходимое для него время, не говоря уж о времени запуска какого-то сервиса». Функция же мониторинга позволяет предотвратить наступление нежелательного события — либо, если таковое произошло, проанализировать его причины, опираясь не на слова, а на запротоколированные данные, хранящиеся в памяти адаптера или файлах на рабочей станции мониторинга.
Эту точку зрения поддерживает и Алексей Сарыгин, технический директор компании Radius Group: «Дистанционное управление мощных ИБП — это вопрос, к которому надо подходить чрезвычайно аккуратно. Если функции дистанционного мониторинга и диспетчеризации необходимы, то практика предоставления доступа персоналу к функциям дистанционного управления представляется радикально неверной. Доступность модулей управления извне потенциально несет в себе риск нарушения безопасности и категорически снижает надежность системы. Если существует физическая возможность дистанционно воздействовать на ИБП, на его параметры, отключение, снятие нагрузки, закрытие выходных тиристорных ключей или блокирование цепи байпаса, то это чревато потерей питания всего ЦОД».
Практически на всех трехфазных ИБП предусмотрена кнопка E.P.O. (Emergency Power Off), дублер которой может быть выведен на пульт управления диспетчерской. Она обеспечивает аварийное дистанционное отключение блоков ИБП при наступлении аварийных событий. Это, пожалуй, единственная возможность обесточить нагрузку, питаемую от трехфазного аппарата, но реализуется она в исключительных случаях.
Что же касается диагностики электропитания, то, как отмечает Юрий Копылов, технический директор московского офиса корпорации Eaton, в последнее время характерной тенденцией в управляющем программном обеспечении стал отказ от предоставления функций удаленного тестирования батарей даже системному администратору.
— Адекватно сравнивать состояние батарей необходимо под нагрузкой, — говорит он, — сам тест запускать не чаще чем раз в два дня, а разряжать батареи надо при одном и том же токе и уровне нагрузки. К тому же процесс заряда — довольно долгий. Все это не идет батареям на пользу.Средства мониторинга
Производители ИБП предоставляют, как правило, сразу несколько средств мониторинга и в некоторых случаях даже управления ИБП — все они основаны на трех основных методах.
В первом случае устройство подключается напрямую через интерфейс RS-232 (Com-порт) к консоли администратора. Дальность такого подключения не превышает 15 метров, но может быть увеличена с помощью конверторов RS-232/485 и RS-485/232 на концах провода, связывающего ИБП с консолью администратора. Такой способ обеспечивает низкую скорость обмена информацией и пригоден лишь для топологии «точка — точка».
Второй способ предполагает использование SNMP-адаптера — встроенной или внешней интерфейсной карты, позволяющей из любой точки локальной сети получить информацию об основных параметрах ИБП. В принципе, для доступа к ИБП через SNMP достаточно веб-браузера. Однако для большего комфорта производители оснащают свои системы более развитым графическим интерфейсом, обеспечивающим функции мониторинга и корректного завершения работы. На базе SNMP-протокола функционируют все основные системы мониторинга и управления ИБП, поставляемые штатно или опционально вместе с ИБП.
Стандартные SNMP-адаптеры поддерживают подключение нескольких аналоговых или пороговых устройств — датчик температуры, движения, открытия двери и проч. Интеграция таких устройств в общую систему мониторинга крупного объекта (например, дата-центра) позволяет охватить огромное количество точек наблюдения и отразить эту информацию на экране диспетчера.
Большое удобство предоставляет метод эксплуатационного удаленного контроля T.SERVICE, позволяющий отследить работу оборудования посредством телефонной линии (через модем GSM) или через Интернет (с помощью интерфейса Net Vision путем рассылки e-mail на электронный адрес потребителя). T.SERVICE обеспечивает диагностирование оборудования в режиме реального времени в течение 24 часов в сутки 365 дней в году. ИБП автоматически отправляет в центр технического обслуживания регулярные отчеты или отчеты при обнаружении неисправности. В зависимости от контролируемых параметров могут отправляться уведомления о неправильной эксплуатации (с пользователем связывается опытный специалист и рекомендует выполнить простые операции для предотвращения ухудшения рабочих характеристик оборудования) или о наличии отказа (пользователь информируется о состоянии устройства, а на место установки немедленно отправляется технический специалист).Профессиональное мнение
Наталья Маркина, коммерческий директор представительства компании SOCOMEC
Управляющее ПО фирмы SOCOMEC легко интегрируется в общий контур управления инженерной инфраструктурой ЦОД посредством разнообразных интерфейсов передачи данных ИБП. Установленное в аппаратной или ЦОД оборудование SOCOMEC может дистанционно обмениваться информацией о своих рабочих параметрах с системами централизованного управления и компьютерными сетями посредством сухих контактов, последовательных портов RS232, RS422, RS485, а также через интерфейс MODBUS TCP и GSS.
Интерфейс GSS предназначен для коммуникации с генераторными установками и включает в себя 4 входа (внешние контакты) и 1 выход (60 В). Это позволяет программировать особые процедуры управления, Global Supply System, которые обеспечивают полную совместимость ИБП с генераторными установками.
У компании Socomec имеется широкий выбор интерфейсов и коммуникационного программного обеспечения для установки диалога между ИБП и удаленными системами мониторинга промышленного и компьютерного оборудования. Такие опции связи, как панель дистанционного управления, интерфейс ADC (реконфигурируемые сухие контакты), обеспечивающий ввод и вывод данных при помощи сигналов сухих контактов, интерфейсы последовательной передачи данных RS232, RS422, RS485 по протоколам JBUS/MODBUS, PROFIBUS или DEVICENET, MODBUS TCP (JBUS/MODBUS-туннелирование), интерфейс NET VISION для локальной сети Ethernet, программное обеспечение TOP VISION для выполнения мониторинга с помощью рабочей станции Windows XP PRO — все это позволяет контролировать работу ИБП удобным для пользователя способом.
Весь контроль управления ИБП, ДГУ, контроль окружающей среды сводится в единый диспетчерский пункт посредством протоколов JBUS/MODBUS.
Индустриальный подход
Третий метод основан на использовании высокоскоростной индустриальной интерфейсной шины: CANBus, JBus, MODBus, PROFIBus и проч. Некоторые модели ИБП поддерживают разновидность универсального smart-слота для установки как карточек SNMP, так и интерфейсной шины. Система мониторинга на базе индустриальной шины может быть интегрирована в уже существующую промышленную SCADA-систему контроля и получения данных либо создана как заказное решение на базе многофункциональных стандартных контроллеров с выходом на шину. Промышленная шина через шлюзы передает информацию на удаленный диспетчерский пункт или в систему управления зданием (Building Management System, BMS). В эту систему могут быть интегрированы и контроллеры, управляющие ИБП.
Универсальные SCADA-системы поддерживают датчики и контроллеры широкого перечня производителей, но они недешевы и к тому же неудобны для внесения изменений. Но если подобная система уже функционирует на объекте, то интеграция в нее дополнительных ИБП не представляет труда.
Сергей Ермаков, технический директор компании Inelt, считает, что применение универсальных систем управления на базе промышленных контроллеров нецелесообразно, если используется для мониторинга только ИБП и ДГУ. Один из практичных подходов — создание заказной системы, с удобной для заказчика графической оболочкой и необходимым уровнем детализации — от карты местности до поэтажного плана и погружения в мнемосхему компонентов ИБП.
— ИБП может передавать одинаковое количество информации о своем состоянии и по прямому соединению, и по SNMP, и по Bus-шине, — говорит Сергей Ермаков. — Применение того или иного метода зависит от конкретной задачи и бюджета. Создав первоначально систему UPS Look для мониторинга ИБП, мы интегрировали в нее систему мониторинга ДГУ на основе SNMP-протокола, после чего по желанию одного из заказчиков конвертировали эту систему на промышленную шину Jbus. Новое ПО JSLook для мониторинга неограниченного количества ИБП и ДГУ по протоколу JBus является полнофункциональным средством мониторинга всей системы электроснабжения объекта.Профессиональное мение
Денис Андреев, руководитель департамента ИБП компании Landata
Практически все ИБП Eaton позволяют использовать коммуникационную Web-SNMP плату Connect UPS и датчик EMP (Environmental Monitoring Probe). Такой комплект позволяет в числе прочего осуществлять мониторинг температуры, влажности и состояния пары «сухих» контактов, к которым можно подключить внешние датчики.
Решение Eaton Environmental Rack Monitor представляет собой аналог такой связки, но с существенно более широким функционалом. Внешне эта система мониторинга температуры, влажности и состояния «сухих» контактов выполнена в виде компактного устройства, которое занимает минимум места в шкафу или в помещении.
Благодаря наличию у Eaton Environmental Rack Monitor (ERM) двух выходов датчики температуры или влажности можно разместить в разных точках стойки или помещения. Поскольку каждый из двух датчиков имеет еще по два сухих контакта, с них дополнительно можно принимать сигналы от датчиков задымления, утечки и проч. В центре обработки данных такая недорогая система ERM, состоящая из неограниченного количества датчиков, может транслировать информацию по протоколу SNMP в HTML-страницу и позволяет, не приобретая специального ПО, получить сводную таблицу измеряемых величин через веб-браузер.
Проблему дефицита пространства и высокой плотности размещения оборудования в серверных и ЦОД решают системы распределения питания линейки Eaton eDPU, которые можно установить как внутри стойки, так и на группу стоек.
Все модели этой линейки представляют четыре семейства: системы базового исполнения, системы с индикацией потребляемого тока, с мониторингом (локальным и удаленным, по сети) и управляемые, с возможностью мониторинга и управления электропитанием вплоть до каждой розетки. С помощью этих устройств можно компактным способом увеличить количество розеток в одной стойке, обеспечить контроль уровня тока и напряжения критичной нагрузки.
Контроль уровня потребляемой мощности может осуществляться с высокой степенью детализации, вплоть до сервера, подключенного к конкретной розетке. Это позволяет выяснить, какой сервер перегревается, где вышел из строя вентилятор, блок питания и т. д. Программным образом можно запустить сервер, подключенный к розетке ePDU. Интеграция системы контроля ePDU в платформу управления Eaton находится в процессе реализации.Требование объекта
Как поясняет Олег Письменский, в критичных объектах, таких как ЦОД, можно условно выделить две области контроля и управления. Первая, Grey Space, — это собственно здание и соответствующая система его энергообеспечения и энергораспределения. Вторая, White Space, — непосредственно машинный зал с его системами.
Выбор системы управления энергообеспечением ЦОД определяется типом объекта, требуемым функционалом системы управления и отведенным на эти цели бюджетом. В большинстве случаев кратковременная задержка между наступлением события и получением информации о нем системой мониторинга по SNMP-протоколу допустима. Тем не менее в целом ряде случаев, если характеристики объекта подразумевают непрерывность его функционирования, объект является комплексным и содержит большое количество элементов, требующих контроля и управления в реальном времени, ни одна стандартная система SNMP-мониторинга не обеспечит требуемого функционала. Для таких объектов применяют системы управления real-time, построенные на базе программно-аппаратных комплексов сбора данных, в том числе c функциями Softlogic.
Системы диспетчеризации и управления крупными объектами реализуются SCADA-системами, широкий перечень которых сегодня присутствует на рынке; представлены они и в портфеле решений Schneider Electric. Тип SCADA-системы зависит от класса и размера объекта, от количества его элементов, требующих контроля и управления, от уровня надежности. Частный вид реализации SCADA — это BMS-система(Building Management System).
«Дата-центры с объемом потребляемой мощности до 1,5 МВт и уровнем надежности Tier I, II и, с оговорками, даже Tier III, могут обслуживаться без дополнительной SCADA-системы, — говорит Олег Письменский. — На таких объектах целесообразно применять ISX Central — программно-аппаратный комплекс, использующий SNMP. Если же категория и мощность однозначно предполагают непрерывность управления, в таких случаях оправданна комбинация SNMP- и SCADA-системы. Например, для машинного зала (White Space) применяется ISX Central с возможными расширениями как Change & Capacity Manager, в комбинации со SCADA-системой, управляющей непосредственно объектом (Grey Space)».Профессиональное мнение
Олег Письменский, директор департамента консалтинга APC by Schneider Electric в России и СНГ
Подход APC by Schneider Electric к реализации полномасштабного полноуправляемого и надежного ЦОД изначально был основан на базисных принципах управления ИТ-инфраструктурой в рамках концепции ITIL/ITSM. И история развития системы управления инфраструктурой ЦОД ISX Manager, которая затем интегрировалась с программно-аппаратным комплексом NetBotz и трансформировалась в портал диспетчеризации ISX Central, — лучшее тому доказательство.
Первым итогом поэтапного приближения к намеченной цели стало наращивание функций контроля параметров энергообеспечения. Затем в этот контур подключилась система управления кондиционированием, система контроля параметров окружающей среды. Очередным шагом стало измерение скорости воздуха, влажности, пыли, радиации, интеграция сигналов от камер аудио- и видеонаблюдения, системы управления блоками розеток, завершения работы сервера и т. д.
Эта система не может и не должна отвечать абсолютно всем принципам ITSM, потому что не все они касаются существа поставленной задачи. Но как только в отношении политик и некоторых тактик управления емкостью и изменениями в ЦОД потребовался соответствующий инструментарий — это нашло отражение в расширении функционала ISX Central, который в настоящее время реализуют ПО APC by Schneider Electric Capacity Manager и APC by Schneider Electric Change Manager. С появлением этих двух решений, интегрированных в систему управления реальным объектом, АРС предоставляет возможность службе эксплуатации оптимально планировать изменения количественного и качественного состава оборудования машинного зала — как на ежедневном оперативном уровне, так и на уровне стратегических задач массовых будущих изменений.
Решение APC by Schneider Electric Capacity обеспечивает автоматизированную обработку информации о свободных ресурсах инженерной инфраструктуры, реальном потреблении мощности и пространстве в стойках. Обращаясь к серверу ISX Central, системы APC by Schneider Electric Capacity Manager и APC by Schneider Electric Change Manager оценивают степень загрузки ИБП и систем охлаждения InRow, прогнозируют воздействие предполагаемых изменений и предлагают оптимальное место для установки нового или перестановки имеющегося оборудования. Новые решения позволяют, выявив последствия от предполагаемых изменений, правильно спланировать замену оборудования в ЦОД.
Переход от частного к общему может потребовать интеграции ISX Central в такие, например, порталы управления, как Tivoli или Open View. Возможны и другие сценарии, когда ISX Central вписывается и в SCADA–систему. В этом случае ISX Central выполняет роль диспетчерской настройки, функционал которой распространяется на серверную комнату, но не охватывает целиком периметр объекта.Случай из практики
Решение задачи управления энергообеспечением ЦОД иногда вступает в противоречие с правилами устройств электроустановок (ПУЭ). Может оказаться, что в соответствии с ПУЭ в ряде случаев (например, при компоновке щитов ВРУ) необходимо обеспечить механические блокировки. Однако далеко не всегда это удается сделать. Поэтому такая задача часто требует нетривиального решения.
— В одном из проектов, — вспоминает Алексей Сарыгин, — где система управления включала большое количество точек со взаимными пересечениями блокировок, требовалось не допустить снижения общей надежности системы. В этом случае мы пришли к осознанному компромиссу, сделали систему полуавтоматической. Там, где это было возможно, присутствовали механические блокировки, за пультом дежурной смены были оставлены функции мониторинга и анализа, куда сводились все данные о положении всех автоматов. Но исполнительную часть вывели на отдельную панель управления уже внутри ВРУ, где были расположены подробные пользовательские инструкции по оперативному переключению. Таким образом мы избавились от излишней автоматизации, но постарались минимизировать потери в надежности и защититься от ошибок персонала.
[ http://www.computerra.ru/cio/old/products/infrastructure/421312/]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > power management
20 pull
pul
1. сущ.
1) а) тяга, дерганье;
натяжение;
тянущая сила;
натяжение, растяжение б) тяга (о потоке воздуха, также о детали печи) в) тяга, влечение;
привлекательность г) напряжение, усилие д) затяжка (при курении) ;
глоток
2) а) гребля, удар весла б) прогулка на лодке
3) а) шнурок, ручка( звонка и т. п.) б) тех. тяга
4) а) разг. блат, протекция, связи б) разг. преимущество (on, upon, over - перед кем-л.)
2. гл.
1) а) тянуть, тащить Syn: drag, haul, tug, yank Ant: propel б) натягивать, растягивать He pulled his hat over his eyes. ≈ Он нахлобучил шляпу на глаза. в) тянуть, иметь тягу г) присасывать, притягивать
2) грести, идти на веслах;
плыть( о лодке с гребцами)
3) а) дергать;
выдергивать, вытаскивать He had two teeth pulled. ≈ Ему удалили два зуба. б) растягивать, разрывать He pulled his muscle in the game. ≈ Во время игры он растянул мышцу. в) рвать, собирать( цветы, фрукты)
4) разг. делать облаву
5) спорт отбивать мяч влево( в крикете, гольфе) ∙ pull about pull around pull ahead pull along pull apart pull aside pull at pull away pull back pull down pull for pull in pull into pull off pull on pull out pull over pull round pull through pull together pull up pull a face, pull faces ≈ гримасничать, строить рожи to pull strings, pull ropes, pull wires ≈ нажимать тайные пружины;
влиять на ход дела;
быть скрытым двигателем (чего-л.) to pull weight ≈ исполнять свою долю работы to pull anchor ≈ сняться с якоря, отправиться to pull the nose ≈ (о) дурачить to pull in horns ≈ присмиреть;
сбавить тон to pull in a belt ≈ затянуть( потуже) пояс тяга, дерганье - to give a * at the rope потянуть за веревку ручка, кольцо( ящика, дверцы) ;
шнурок (звонка, шторы) - * switch выключатель со шнурком (специальное) натяжение, растяжение сила тяги растягивающее усилие, тянущая сила ( спортивное) тяговое движение тяговое устройство;
тяговый канат( спортивное) напряжение, усилие - final * заключительное напряжение (тяжелая атлетика) трудный подъем;
трудное путешествие удар весла (разговорное) очередь грести (разговорное) короткая прогулка на лодке - they went for a short * on the lake они поехали покататься по озеру сдерживание лошади на скачках (чтобы не допустить выигрыша) спуск курка огнестрельного оружия глоток - to have a * at the bottle приложиться к бутылке;
глотнуть, выпить( спиртного) затяжка (табачным дымом) (разговорное) преимущество - the * of the table( карточное) преимущество сдающего или банкомета (разговорное) протекция, связи, блат - to get a job through * получить должность по протекции (разговорное) привлекательность, броскость (объявления, рекламы) - the * of a big city притягательная сила большого города (полиграфия) пробный оттиск усадочная раковина( техническое) пневмоколесный трактор-тягач( специальное) протаскивание;
волочение тянуть, тащить - to * the door open потянуть к себе дверь, чтобы открыть ее - to * down спускать, опускать натягивать;
надвигать - to * one's hat over one's eyes надвинуть шляпу на глаза дергать - to * a bell позвонить в звонок вытаскивать, выдергивать;
выдвигать - to * a cork вытащить пробку тянуть;
иметь тягу - my pipe is *ing very badly today сегодня моя трубка очень плохо курится тянуть, пить (особенно с жадностью) ;
всасывать - to * at a bottle приложиться к бутылке, глотнуть из бутылки затягиваться( сигаретой) грести;
идти, плыть на веслах - to * ashore грести к берегу иметь определенное количество весел (о лодке) - our boat *s four oars у нас четырехвесельная лодка работать веслом - to * a good oar быть хорошим гребцом перевозить на лодке двигаться, ехать( о поезде, автомобиле) - to * away отъезжать - he *ed away from the kerb он отъехал от тротуара подъезжать, подходить - the train *ed into the station поезд подошел к станции останавливаться - we *ed into the kerb мы остановились у тротуара (сленг) арестовать, забрать - to get *ed попасть под арест;
угодить в тюрьму сделать облаву, налет схватить за руку вора;
поймать на месте преступления( сленг) стащить, стянуть( спортивное) бежать маховым шагом( полиграфия) делать оттиск вырывать с корнем;
уничтожать растянуть( мышцу, сухожилие) рвать, срывать, собирать ( цветы, фрукты) убирать (корнеплоды) полоть (вручную) ощипывать (дичь) ;
выщипывать щетину или волос теребить( лен) корчевать натягивать (удила) - the horse *s лошадь натягивает удила сдерживать, осаживать( лошадь на скачках) - to * a horse подбирать вожжи;
натягивать поводья (американизм) (сленг) выхватить, вытащить (револьвер, нож) - he *ed a gun at his partner он выхватил пистолет и стал угрожать своему партнеру разрывать, раздирать (на части) - to * to pieces разорвать на куски;
раскритиковать;
разнести в пух и прах отрывать;
оттягивать;
оттаскивать - it was hard for him to * away from the ties of home ему было трудно оторваться от родного дома привлекать (внимание) ;
пользоваться( успехом) - advertisement that *s custom реклама, которая привлекает покупателей привлекать (на свою сторону) ;
получать( поддержку) - he *ed more votes than his running mate ему удалось собрать больше голосов на выборах, чем его конкуренту (разговорное) поддерживать, подбадривать (какую-либо сторону) ;
"болеть" (за какую-либо команду) - he nearly always *s for the weak он всегда выступает на стороне слабых (разговорное) сделать, совершить (что-либо дерзкое, неожиданное или недозволенное) - to * a crime совершить преступление( разговорное) получать (оценку, отметку) - he *ed an A in his English course он получил высшую оценку по английскому языку (спортивное) отбивать (мяч, посылая его влево) (сленг) наносить удар не в полную силу (бокс) - to * a punch ударить вполсилы;
действовать осторожно;
проявлять сдержанность, осмотрительность > to * caps ссориться, пререкаться > to * leather( американизм) стараться удержаться в седле;
(американизм) цепляться за что-либо > to * a fast one (on smb.) ловко обмануть /надуть, одурачить/ (кого-л.) ;
совершить махинацию > * devil /baker, dog, cat/! валяй!, давай!, жми! (возгласы поощрения на состязаниях) > to * the devil by the tail быть в стесненных обстоятельствах;
биться как рыба об лед > to * foot, to * it удирать, улепетывать;
бежать со всех ног, бежать сломя голову > to * smb.'s /the other/ leg подшучивать над кем-л.;
морочить кому-л. голову > to * a face /faces/ сделать гримасу, гримасничать, строить /корчить/ рожи > to * a long face иметь огорченный /кислый, унылый/ вид > he *ed a long face у него вытянулась физиономия > to * the long bow чрезмерно лгать или хвастаться;
рассказывать небылицы;
привирать > to * strings нажимать на тайные пружины, пустить в ход связи;
тайно влиять( на что-л.) > to * every string in order to attain one's end пустить в ход все связи /нажать на все пружины/, чтобы добиться своей цели;
тайно влиять на ход дела, быть скрытым двигателем;
стоять за спиной кого-либо > to * rank (американизм) использовать служебное положение в личных целях > to * wires нажимать на тайные пружины, пустить в ход связи;
тайно влиять (на что-л.) > he *ed wires to get the position for his son он пустил в ход свои связи, чтобы устроить сына на эту должность > to * smb.'s teeth сделать беззащитным, обезоружить, обезвредить;
вырвать у змеи жало > to * a lone oar действовать /работать/ в одиночку > to * one's weight быть хорошим гребцом;
выполнить свою долю работы > to * one freight( американизм) быстро уйти или уехать, смыться > to * a boner( американизм) попасть впросак, сесть в лужу > to * the nose (о) дурачить > to * the carpet( out) from under smb. неожиданно прекращать оказание помощи;
выбить у кого-л. почву /землю/ из-под ног block ~ полигр. пробный оттиск клише ~ off отходить, отъезжать;
the boat pulled off from the shore лодка отчалила от берега;
the horseman pulled off the road всадник съехал с дороги demand ~ интенсивность спроса ~ round вылечивать;
the doctors tried in vain to pull him round врачи безуспешно пытались спасти его ~ out вытаскивать;
удалять( зубы) ;
the drawer won't pull out ящик не выдвигается ~ тяга, дерганье;
натяжение;
тянущая сила;
to give a pull at the bell дернуть звонок ~ глоток;
затяжка (табачным дымом) ;
to have a pull at the bottle глотнуть, выпить (спиртного) pull вытаскивать, выдергивать;
to pull a cork вытащить пробку;
he had two teeth pulled ему удалили два зуба ~ растягивать;
разрывать;
to pull to pieces разорвать на куски;
перен. раскритиковать, разнести;
he pulled his muscle in the game во время игры он растянул мышцу ~ тянуть, тащить;
натягивать;
to pull a cart везти тележку;
to pull the horse натягивать поводья, вожжи;
the horse pulls лошадь натягивает поводья, вожжи ~ off отходить, отъезжать;
the boat pulled off from the shore лодка отчалила от берега;
the horseman pulled off the road всадник съехал с дороги ~ in втягивать;
перен. зарабатывать, загребать;
I don't know what you are pulling in now не знаю, сколько вы теперь зарабатываете ~ напряжение, усилие;
a long pull uphill трудный подъем в гору ~ тянуть, иметь тягу;
my pipe pulls badly моя трубка плохо тянет pull вытаскивать, выдергивать;
to pull a cork вытащить пробку;
he had two teeth pulled ему удалили два зуба ~ глоток;
затяжка (табачным дымом) ;
to have a pull at the bottle глотнуть, выпить (спиртного) ~ гребля;
прогулка на лодке ~ грести, идти на веслах;
плыть (о лодке с гребцами) ;
to pull a good oar быть хорошим гребцом ~ разг. делать облаву (на игорные дома и т. п.) ~ полигр. делать оттиски ~ дергать;
to pull (smb.'s) hair дергать (кого-л.) за волосы;
to pull a bell звонить ~ надвигать, натягивать;
he pulled his hat over his eyes он нахлобучил шляпу на глаза ~ напряжение, усилие;
a long pull uphill трудный подъем в гору ~ спорт. отбивать мяч (влево - в крикете, гольфе) ~ разг. преимущество (on, upon, over - перед кем-л.) ~ привлекательность ~ привлекательность рекламы ~ притягивать, присасывать ~ полигр. пробный оттиск ~ пробный оттиск ~ разг. протекция, связи, блат ~ протекция ~ растягивать;
разрывать;
to pull to pieces разорвать на куски;
перен. раскритиковать, разнести;
he pulled his muscle in the game во время игры он растянул мышцу ~ растяжение ~ рвать, собирать (цветы, фрукты) ~ тяга (дымовой трубы) ~ тяга, дерганье;
натяжение;
тянущая сила;
to give a pull at the bell дернуть звонок ~ тянуть, иметь тягу;
my pipe pulls badly моя трубка плохо тянет ~ тянуть, тащить;
натягивать;
to pull a cart везти тележку;
to pull the horse натягивать поводья, вожжи;
the horse pulls лошадь натягивает поводья, вожжи ~ удар весла ~ усилие ~ шнурок, ручка (звонка и т. п.) ~ дергать;
to pull (smb.'s) hair дергать (кого-л.) за волосы;
to pull a bell звонить ~ тянуть, тащить;
натягивать;
to pull a cart везти тележку;
to pull the horse натягивать поводья, вожжи;
the horse pulls лошадь натягивает поводья, вожжи pull вытаскивать, выдергивать;
to pull a cork вытащить пробку;
he had two teeth pulled ему удалили два зуба to ~ anchor сняться с якоря, отправиться;
to pull a face (или faces) гримасничать, строить рожи ~ about грубо, бесцеремонно обращаться ~ about таскать туда и сюда to ~ anchor сняться с якоря, отправиться;
to pull a face (или faces) гримасничать, строить рожи ~ apart придираться, критиковать ~ apart разрывать ~ at дергать ~ at затягиваться (папиросой и т. п.) ~ at тянуть (из бутылки) ~ back отступать ~ back оттягивать ~ back мор. табанить ~ devil!, ~ baker! поднажми!, давай!, а ну еще! (возгласы одобрения на состязаниях) ;
to pull the nose одурачить, дурачить ~ devil!, ~ baker! поднажми!, давай!, а ну еще! (возгласы одобрения на состязаниях) ;
to pull the nose одурачить, дурачить ~ down изнурять, ослаблять ~ down понижать, снижать (в цене, чине и т. п.) ~ down сбивать (спесь) ~ down сносить (здание) ~ дергать;
to pull (smb.'s) hair дергать (кого-л.) за волосы;
to pull a bell звонить ~ in втягивать;
перен. зарабатывать, загребать;
I don't know what you are pulling in now не знаю, сколько вы теперь зарабатываете ~ in осаживать (лошадь) ~ in прибывать( на станцию и т. п.- о поезде) ~ in сдерживать себя ~ in сокращать (расходы) ~ off выиграть (приз, состязание) ~ off добиться, несмотря на трудности;
справиться с задачей ~ off отходить, отъезжать;
the boat pulled off from the shore лодка отчалила от берега;
the horseman pulled off the road всадник съехал с дороги ~ off снимать, стаскивать ~ on натягивать ~ on тянуть ручку на себя, к себе to ~ one's weight исполнять свою долю работы ~ up сдерживаться;
to pull oneself up собираться с силами;
брать себя в руки ~ out вырывать;
выщипывать ~ out вытаскивать;
удалять (зубы) ;
the drawer won't pull out ящик не выдвигается ~ out ав. выходить изпикирования ~ out выходить на веслах ~ out удаляться;
отходить (от станции - о поезде) ~ out удлинять ~ over надевать через голову ~ over перетаскивать;
перетягивать ~ round вылечивать;
the doctors tried in vain to pull him round врачи безуспешно пытались спасти его ~ round поправляться (после болезни) ~ up идти впереди других или наравне с другими( в состязаниях) ;
to pull strings (или ropes, wires) нажимать тайные пружины;
влиять на ход дела;
быть скрытым двигателем (чего-л.) ~ тянуть, тащить;
натягивать;
to pull a cart везти тележку;
to pull the horse натягивать поводья, вожжи;
the horse pulls лошадь натягивает поводья, вожжи ~ devil!, ~ baker! поднажми!, давай!, а ну еще! (возгласы одобрения на состязаниях) ;
to pull the nose одурачить, дурачить ~ through выжить ~ through спасти(сь) от (опасности и т. д.), выпутать(ся) ;
преодолеть( трудности и т. п.) ;
we shall pull through somehow мы уж как-нибудь вывернемся ~ растягивать;
разрывать;
to pull to pieces разорвать на куски;
перен. раскритиковать, разнести;
he pulled his muscle in the game во время игры он растянул мышцу ~ together refl. взять себя в руки;
встряхнуться;
собраться с духом ~ together работать дружно ~ up идти впереди других или наравне с другими (в состязаниях) ;
to pull strings (или ropes, wires) нажимать тайные пружины;
влиять на ход дела;
быть скрытым двигателем (чего-л.) ~ up осаживать;
делать выговор ~ up останавливать(ся) ~ up сдерживаться;
to pull oneself up собираться с силами;
брать себя в руки ~ together refl. взять себя в руки;
встряхнуться;
собраться с духом ~ through спасти(сь) от (опасности и т. д.), выпутать(ся) ;
преодолеть (трудности и т. п.) ;
we shall pull through somehow мы уж как-нибудь вывернемсяСтраницыСм. также в других словарях:
время работы станции — — [Л.Г.Суменко. Англо русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.] Тематики информационные технологии в целом EN hours of service … Справочник технического переводчика
ГРАФИК РАБОТЫ СТАНЦИИ — график технолог. процесса работы жел. дор. станции, служащий для оперативного руководства пропуском транзитных поездов, формированием и расформированием поездных составов и подачей уборкой вагонов под погрузку выгрузку. Г. р. с. ведет сменный… … Технический железнодорожный словарь
"Школьные базары" в Москве. Адреса и время работы — В преддверии нового учебного года в Москве открываются "школьные базары". По информации Депатрамета потребительского рынка и услуг г..Москвы, с 15 августа функционируют 54 "школьных базара", на которых представлен весь… … Энциклопедия ньюсмейкеров
время — 3.3.4 время tE (time tE): время нагрева начальным пусковым переменным током IА обмотки ротора или статора от температуры, достигаемой в номинальном режиме работы, до допустимой температуры при максимальной температуре окружающей среды. Источник … Словарь-справочник терминов нормативно-технической документации
РАБОТЫ МАЛЯРНЫЕ — работы, связанные с применением лаков, красок, белил и др. материалов. При выполнении этих работ необходимо соблюдать следующие правила безопасности: перед началом работ, особенно с материалами на нитрооснове, необходимо проверить вентиляцию и… … Российская энциклопедия по охране труда
Список пилотируемых полётов к орбитальной станции «Мир» — За время работы станции на ней побывало 104 космонавта из 12 стран мира. Союз Т 15 с 13 марта по 4 мая, с 26 июня по 16 июля 1986 Леонид Кизим Владимир Соловьёв Союз ТМ 2 с 5 февраля по 30 июля 1987 Юрий Романенко Александр Лавейкин Союз ТМ 3 с… … Википедия
Станции для прокормления странствующих рабочих и предоставления им ночлега — особенно распространились в Германии и Швейцарии после введения свободы передвижения. В Пруссии, по инициативе Вихерна (см.) и боннского профессора Пертеса, благотворительными обществами основаны были уже в начале 50 х гг. первые рабочие… … Энциклопедический словарь Ф.А. Брокгауза и И.А. Ефрона
Станции железных дорог — С. жел. дор. расположенные на концах линий и в промежуточных пунктах на расстояниях, именуемых перегонами, служат с одной стороны для сношений с публикой как с пассажирами, так и отправителями и получателями товаров, а с другой для всех работ,… … Энциклопедический словарь Ф.А. Брокгауза и И.А. Ефрона
Электрические станции* — I. Общие понятия. II. Типы Э. станций по производству Э. энергии. III. Классификация их. IV. Здания и помещения Э. станций. V. Оборудование Э. станций. VI. Эксплуатация Э. станций. VII. Судовые Э. станции. VIII. Вагонные и поездные Э. станции. IX … Энциклопедический словарь Ф.А. Брокгауза и И.А. Ефрона
Электрические станции — I. Общие понятия. II. Типы Э. станций по производству Э. энергии. III. Классификация их. IV. Здания и помещения Э. станций. V. Оборудование Э. станций. VI. Эксплуатация Э. станций. VII. Судовые Э. станции. VIII. Вагонные и поездные Э. станции. IX … Энциклопедический словарь Ф.А. Брокгауза и И.А. Ефрона
Авария на Чернобыльской атомной станции — Координаты: 51°23′22.39″ с. ш. 30°05′56.93″ в. д. / 51.389553° с. ш. 30.099147° в. д … Википедия
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с английского на русский
с русского на английский- С русского на:
- Английский
- С английского на:
- Русский